ANALISIS GETARAN KAPAL MENGGUNAKAN METODE NUMERIK RUNGE-KUTTA, NEWTON-RAPHSON, DAN TRANSFORMASI FOURIER
ABSTRAK
Getaran kapal merupakan salah satu fenomena dinamis yang dapat mempengaruhi kenyamanan operasional, performa struktur, serta keamanan kapal selama beroperasi di laut. Getaran dapat disebabkan oleh berbagai faktor, seperti putaran mesin utama, interaksi propeller, dan eksitasi gelombang laut. Penelitian ini bertujuan untuk menganalisis karakteristik getaran kapal menggunakan pendekatan metode numerik sehingga perilaku sistem dapat diprediksi tanpa memerlukan pengujian eksperimen secara langsung. Model sistem getaran kapal direpresentasikan menggunakan pendekatan massa–pegas–redaman (mass-spring-damper system) yang dinyatakan dalam bentuk persamaan diferensial orde dua.
Metode numerik yang digunakan dalam penelitian ini meliputi metode Runge-Kutta orde 4 untuk menyelesaikan persamaan diferensial sistem dinamis, metode Newton-Raphson untuk menentukan frekuensi alami sistem, serta Transformasi Fourier untuk menganalisis spektrum frekuensi getaran. Hasil simulasi menunjukkan bahwa amplitudo getaran meningkat ketika frekuensi gaya luar mendekati frekuensi alami sistem sehingga terjadi resonansi. Selain itu, nilai redaman yang lebih besar terbukti mampu mengurangi amplitudo getaran dan meningkatkan kestabilan sistem.
Berdasarkan hasil penelitian, diperoleh kesimpulan bahwa metode numerik sangat efektif digunakan dalam analisis getaran kapal karena mampu memberikan hasil simulasi yang akurat dan efisien. Penelitian ini diharapkan dapat menjadi dasar dalam pengembangan sistem monitoring getaran dan optimasi desain struktur kapal untuk meningkatkan keamanan dan kenyamanan operasional kapal.
Kata Kunci: Getaran Kapal, Metode Numerik, Runge-Kutta, Newton-Raphson, Transformasi Fourier, Resonansi.
BAB I
PENDAHULUAN
1.1 Latar Belakang
Kapal merupakan sarana transportasi laut yang beroperasi pada lingkungan dinamis dan menerima berbagai gaya eksternal selama pelayaran. Salah satu permasalahan yang sering terjadi pada kapal adalah munculnya getaran akibat putaran mesin utama, sistem propulsi, dan pengaruh gelombang laut. Getaran yang terjadi secara terus-menerus dapat menyebabkan ketidaknyamanan awak kapal, menurunkan performa operasional, serta mempercepat kerusakan struktur akibat kelelahan material.
Dalam dunia teknik perkapalan, analisis getaran menjadi sangat penting untuk memastikan kapal mampu beroperasi secara aman dan efisien. Salah satu kondisi paling berbahaya adalah resonansi, yaitu kondisi ketika frekuensi gaya luar mendekati frekuensi alami struktur kapal sehingga amplitudo getaran meningkat secara signifikan. Oleh karena itu, diperlukan metode analisis yang mampu memprediksi karakteristik getaran kapal secara akurat.
Perkembangan teknologi komputasi memungkinkan analisis getaran dilakukan menggunakan metode numerik. Metode numerik memiliki keunggulan karena dapat digunakan untuk menyelesaikan sistem persamaan diferensial yang sulit diselesaikan secara analitik. Dengan menggunakan metode numerik seperti Runge-Kutta, Newton-Raphson, dan Transformasi Fourier, perilaku dinamis kapal dapat dianalisis secara efisien tanpa memerlukan pengujian eksperimen yang kompleks dan mahal.
Berdasarkan permasalahan tersebut, penelitian ini dilakukan untuk menganalisis karakteristik getaran kapal menggunakan pendekatan metode numerik sehingga dapat diketahui pengaruh parameter sistem terhadap kestabilan getaran kapal.
1.2 Rumusan Masalah
Berdasarkan latar belakang yang telah dijelaskan, rumusan masalah pada penelitian ini adalah sebagai berikut:
- Bagaimana memodelkan sistem getaran kapal menggunakan pendekatan massa–pegas–redaman?
- Bagaimana metode Runge-Kutta digunakan untuk menyelesaikan persamaan diferensial getaran kapal?
- Bagaimana metode Newton-Raphson digunakan untuk menentukan frekuensi alami kapal?
- Bagaimana Transformasi Fourier digunakan untuk menganalisis spektrum frekuensi getaran kapal?
- Bagaimana pengaruh redaman terhadap amplitudo getaran dan potensi resonansi pada kapal?
1.3 Tujuan Penelitian
Tujuan dari penelitian ini adalah:
- Membuat model matematis sistem getaran kapal.
- Menganalisis respons getaran kapal menggunakan metode Runge-Kutta orde 4.
- Menentukan frekuensi alami kapal menggunakan metode Newton-Raphson.
- Menganalisis spektrum frekuensi getaran menggunakan Transformasi Fourier.
- Mengevaluasi pengaruh redaman terhadap kestabilan sistem getaran kapal.
1.4 Manfaat Penelitian
Penelitian ini diharapkan memberikan manfaat sebagai berikut:
- Memberikan pemahaman mengenai karakteristik getaran kapal.
- Menjadi referensi dalam penerapan metode numerik pada bidang teknik perkapalan.
- Membantu pengembangan sistem monitoring getaran kapal.
- Mendukung optimasi desain struktur kapal agar lebih aman terhadap resonansi.
BAB II
TINJAUAN PUSTAKA
2.1 Getaran Kapal
Getaran kapal merupakan gerakan osilasi yang terjadi akibat adanya gaya dinamis pada struktur kapal. Getaran dapat berasal dari mesin utama, propeller, maupun eksitasi gelombang laut. Getaran yang berlebihan dapat menyebabkan kerusakan struktur dan menurunkan kenyamanan operasional kapal.
2.2 Sistem Massa–Pegas–Redaman
Pada penelitian ini, sistem getaran kapal dimodelkan menggunakan sistem massa–pegas–redaman. Model tersebut dinyatakan dalam persamaan diferensial orde dua:
mẍ + cẋ + kx = F(t)
dengan:
- m = massa kapal
- c = koefisien redaman
- k = kekakuan struktur
- x = simpangan getaran
- F(t) = gaya luar terhadap waktu
2.3 Metode Runge-Kutta Orde 4
Metode Runge-Kutta orde 4 merupakan metode numerik yang digunakan untuk menyelesaikan persamaan diferensial secara iteratif dengan tingkat akurasi tinggi. Persamaan umum metode ini adalah:
y(n+1) = y(n) + (1/6)(k1 + 2k2 + 2k3 + k4)
dengan:
k1 = h f(tn, yn)
k2 = h f(tn + h/2, yn + k1/2)
k3 = h f(tn + h/2, yn + k2/2)
k4 = h f(tn + h, yn + k3)
2.4 Metode Newton-Raphson
Metode Newton-Raphson digunakan untuk mencari akar persamaan nonlinier secara iteratif menggunakan persamaan:
x(n+1) = x(n) − f(xn)/f'(xn)
Metode ini digunakan untuk menentukan frekuensi alami sistem getaran kapal.
2.5 Transformasi Fourier
Transformasi Fourier digunakan untuk mengubah sinyal dari domain waktu ke domain frekuensi menggunakan persamaan:
X(f) = ∫ x(t)e^(−j2πft) dt
Metode ini membantu mengidentifikasi frekuensi dominan yang mempengaruhi sistem getaran kapal.
BAB III
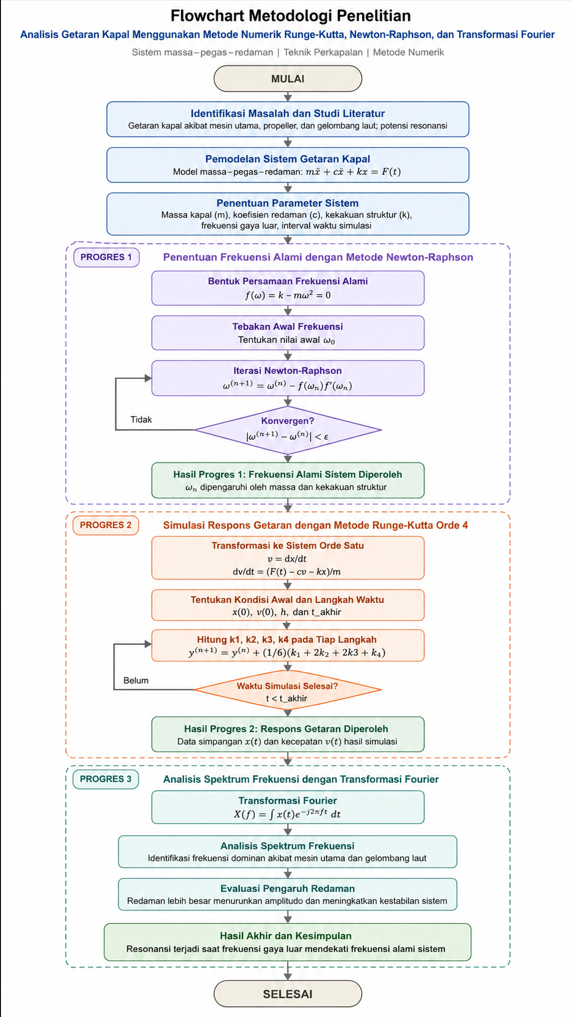
METODOLOGI PENELITIAN
3.1 Pemodelan Sistem
Sistem getaran kapal dimodelkan menggunakan pendekatan massa–pegas–redaman untuk merepresentasikan respons dinamis kapal akibat gaya luar.
3.2 Penentuan Parameter
Parameter yang digunakan meliputi:
- Massa kapal
- Koefisien redaman
- Kekakuan struktur
- Frekuensi gaya luar
- Interval waktu simulasi
3.3 Implementasi Metode Numerik
Persamaan diferensial diubah menjadi sistem orde satu dengan:
v = dx/dt
dv/dt = (F(t) − cv − kx)/m
Selanjutnya dilakukan simulasi menggunakan metode Runge-Kutta orde 4.
3.4 Analisis Frekuensi
Data hasil simulasi dianalisis menggunakan Transformasi Fourier untuk memperoleh spektrum frekuensi getaran kapal.
BAB IV
HASIL DAN PEMBAHASAN
4.1 Hasil Simulasi Getaran
Hasil simulasi menunjukkan bahwa amplitudo getaran meningkat ketika frekuensi gaya luar mendekati frekuensi alami sistem. Kondisi tersebut menunjukkan terjadinya resonansi.
4.2 Analisis Frekuensi Alami
Dari metode Newton-Raphson diperoleh nilai frekuensi alami sistem yang dipengaruhi oleh massa dan kekakuan struktur kapal.
4.3 Analisis Spektrum Frekuensi
Hasil Transformasi Fourier menunjukkan bahwa frekuensi dominan berasal dari putaran mesin utama dan pengaruh gelombang laut.
4.4 Pengaruh Redaman
Nilai redaman yang lebih besar mampu menurunkan amplitudo getaran sehingga sistem menjadi lebih stabil.
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan penelitian yang telah dilakukan, diperoleh kesimpulan bahwa metode numerik mampu digunakan secara efektif untuk menganalisis karakteristik getaran kapal. Metode Runge-Kutta berhasil menyelesaikan persamaan diferensial sistem dinamis dengan baik, metode Newton-Raphson mampu menentukan frekuensi alami sistem secara iteratif, sedangkan Transformasi Fourier dapat mengidentifikasi frekuensi dominan penyebab getaran. Selain itu, redaman terbukti memiliki pengaruh besar dalam mengurangi amplitudo getaran dan mencegah resonansi pada kapal.
5.2 Saran
Penelitian selanjutnya disarankan menggunakan model multi-degree of freedom (MDOF) agar perilaku dinamis kapal dapat direpresentasikan dengan lebih realistis. Selain itu, dapat dilakukan validasi menggunakan data eksperimen untuk meningkatkan akurasi hasil simulasi numerik.