LAPORAN STUDI MANDIRI
Analisis Gaya Angkat dan Hambat pada Kemudi Kapal Menggunakan Pendekatan Komputasi Numerik (CFD)
dengan Kerangka Berpikir DAI5
Disusun oleh: [Nama Mahasiswa] Program Studi: Teknik Sistem Perkapalan Mata Kuliah: Metode Numerik / Hidrodinamika Kapal Tanggal: 18 Mei 2026
اَلسَّلَامُ عَلَيْكُمْ وَرَحْمَةُ اللهِ وَبَرَكَاتُهُ
اَلْحَمْدُ لِلَّهِ رَبِّ الْعَالَمِينَ، وَالصَّلَاةُ وَالسَّلَامُ عَلَى أَشْرَفِ الْأَنْبِيَاءِ وَالْمُرْسَلِينَ، وَعَلَى آلِهِ وَصَحْبِهِ أَجْمَعِينَ. أَمَّا بَعْدُ
BAGIAN AWAL
Kata Pengantar
Alhamdulillah, puji syukur ke hadirat Allah SWT atas segala rahmat, taufik, dan hidayah-Nya sehingga laporan studi mandiri ini dapat diselesaikan. Shalawat dan salam senantiasa tercurah kepada Nabi Muhammad SAW, teladan dalam segala aspek kehidupan, termasuk dalam menuntut ilmu pengetahuan.
Laporan ini merupakan dokumentasi hasil pembelajaran mandiri yang diperoleh melalui diskusi dengan AI-DAI5 mengenai topik Gaya Angkat (Lift Force) dan Gaya Hambat (Drag Force) pada kemudi kapal, serta pendekatannya menggunakan metode numerik dalam kerangka Computational Fluid Dynamics (CFD). Seluruh proses berpikir, analisis, dan kesimpulan dalam laporan ini disusun menggunakan framework DAI5 — sebuah kerangka pemikiran yang mengintegrasikan kesadaran diri, niat, analisis awal, idealisasi, dan instruksi pelaksanaan.
Laporan ini jauh dari sempurna. Penulis mengharapkan kritik dan saran yang membangun dari pembaca. Semoga ilmu yang tertuang dalam laporan ini menjadi amal jariyah yang memberikan manfaat bagi dunia kemaritiman, khususnya dalam aspek keselamatan pelayaran.
وَالسَّلَامُ عَلَيْكُمْ وَرَحْمَةُ اللّٰهِ وَبَرَكَاتُهُ
Daftar Isi
BAGIAN AWAL Kata Pengantar Daftar Isi Abstrak
BAB I — PENDAHULUAN 1.1 Latar Belakang 1.2 Rumusan Masalah 1.3 Tujuan Pembelajaran 1.4 Batasan Masalah 1.5 Sistematika Penulisan
BAB II — LANDASAN TEORI 2.1 Konsep Dasar Hidrodinamika Kemudi Kapal 2.2 Gaya Angkat (Lift Force) 2.3 Gaya Hambat (Drag Force) 2.4 Koefisien Angkat dan Hambat: CL dan CD 2.5 Fenomena Stall dan Titik Kritis 2.6 Persamaan Navier-Stokes dan Keterbatasannya 2.7 Pengantar Metode Numerik dalam CFD
BAB III — METODOLOGI PENYELESAIAN / ALGORITMA 3.1 Kerangka Berpikir DAI5 3.2 Pendefinisian Domain dan Parameter Masalah 3.3 Diskritisasi: Metode Volume Hingga (FVM) 3.4 Penyusunan Sistem Persamaan Linier 3.5 Algoritma Iterasi: Gauss-Seidel 3.6 Kriteria Konvergensi
BAB IV — HASIL DAN PEMBAHASAN 4.1 Parameter Simulasi (Data Fiktif) 4.2 Contoh Iterasi Manual (Gauss-Seidel) 4.3 Tabel Konvergensi 4.4 Analisis Kurva CL vs Sudut Kemudi (δ) 4.5 Identifikasi Titik Kritis (Stall Angle) 4.6 Pembahasan Fisik Hasil Simulasi
BAB V — KESIMPULAN DAN SARAN 5.1 Kesimpulan 5.2 Saran 5.3 Refleksi DAI5
Daftar Pustaka
Abstrak
Laporan ini menyajikan analisis komprehensif mengenai gaya angkat (lift force) dan gaya hambat (drag force) yang bekerja pada sirip kemudi (rudder) kapal, dengan pendekatan komputasi numerik berbasis Computational Fluid Dynamics (CFD). Kemudi kapal merupakan komponen kritis dalam sistem manuver yang bekerja berdasarkan prinsip hidrodinamika — sama halnya dengan cara kerja sayap pesawat terbang di udara, namun bekerja dalam medium air yang memiliki densitas jauh lebih tinggi.
Kajian ini dimulai dari pemahaman fisik tentang bagaimana perbedaan tekanan terbentuk di kedua sisi sirip kemudi ketika dioperasikan pada sudut tertentu (angle of attack, δ), menghasilkan gaya lateral yang mendorong buritan kapal dan mengakibatkan perubahan haluan. Dibahas pula fenomena stall — kondisi kritis di mana peningkatan sudut kemudi justru menyebabkan penurunan tajam gaya angkat disertai lonjakan gaya hambat, akibat pemisahan lapisan batas (boundary layer separation).
Karena persamaan pengatur aliran fluida — yaitu persamaan Navier-Stokes — bersifat non-linear dan tidak memiliki solusi analitik tertutup untuk kasus umum, maka pendekatan numerik diterapkan. Domain fluida di sekitar kemudi didiskritisasi menggunakan Finite Volume Method (FVM) menjadi sejumlah sel komputasional. Sistem persamaan aljabar yang dihasilkan kemudian diselesaikan secara iteratif menggunakan metode Gauss-Seidel hingga mencapai konvergensi.
Dengan data fiktif yang realistis (kapal dengan panjang 120 m, kecepatan 12 knot, kemudi NACA 0015), laporan ini mendemonstrasikan proses iterasi secara manual, menunjukkan kurva CL vs δ, dan mengidentifikasi bahwa titik stall terjadi pada sudut sekitar 35°. Seluruh analisis disusun dalam kerangka pemikiran DAI5 yang mengintegrasikan dimensi teknis dan dimensi kesadaran diri.
Kata Kunci: Kemudi Kapal, Gaya Angkat, Gaya Hambat, Stall, CFD, Metode Numerik, Gauss-Seidel, Finite Volume Method, DAI5.
BAB I: PENDAHULUAN
1.1 Latar Belakang
Laut adalah anugerah Allah SWT yang melingkupi lebih dari 70% permukaan bumi. Di atasnya, manusia telah berlayar selama ribuan tahun — membawa muatan, menyeberangi samudra, dan menghubungkan peradaban. Di era modern, armada kapal niaga menanggung lebih dari 90% volume perdagangan dunia. Di balik setiap perjalanan laut yang aman, terdapat sistem rekayasa yang sangat presisi, salah satunya adalah sistem kemudi kapal.
Kemudi kapal — atau dalam bahasa Inggris disebut rudder — adalah komponen tunggal yang paling bertanggung jawab atas kemampuan kapal untuk berbelok, menghindari bahaya, dan menjaga jalur pelayaran. Kegagalan kemudi di tengah laut bukan sekadar masalah teknis; ia adalah ancaman nyata bagi keselamatan jiwa awak kapal, muatan senilai miliaran rupiah, dan ekosistem laut yang rentan terhadap tumpahan bahan bakar dan muatan berbahaya.
Pemahaman mendalam tentang gaya-gaya yang bekerja pada kemudi kapal — khususnya gaya angkat (lift force) dan gaya hambat (drag force) — adalah fondasi dari desain kemudi yang aman dan efisien. Gaya-gaya ini diatur oleh hukum-hukum hidrodinamika yang pada dasarnya merupakan manifestasi Sunnatullah: keteraturan hukum alam yang ditetapkan oleh Sang Pencipta dan dapat kita pelajari, pahami, serta manfaatkan.
Tantangan utama dalam analisis hidrodinamika kemudi adalah kompleksitas matematis dari persamaan yang mengatur aliran fluida. Persamaan Navier-Stokes, yang menjadi tulang punggung analisis aliran fluida viskos, adalah sistem persamaan diferensial parsial non-linear yang hingga hari ini belum memiliki solusi analitik umum (bahkan pembuktian eksistensi solusinya secara umum merupakan salah satu dari tujuh “Millennium Prize Problems” matematika yang belum terpecahkan). Oleh karena itu, pendekatan numerik melalui Computational Fluid Dynamics (CFD) menjadi jalan yang paling andal dan praktis.
Laporan ini mendokumentasikan perjalanan belajar yang menggabungkan rigoritas teknis dengan kedalaman reflektif melalui kerangka berpikir DAI5.
1.2 Rumusan Masalah
Berdasarkan latar belakang di atas, permasalahan yang dikaji dalam laporan ini dapat dirumuskan sebagai berikut:
Pertama, bagaimana mekanisme fisik terbentuknya gaya angkat (lift) dan gaya hambat (drag) pada sirip kemudi kapal, dan faktor-faktor apa saja yang mempengaruhi besarnya kedua gaya tersebut?
Kedua, apa yang dimaksud dengan titik kritis (stall) pada kemudi kapal, kapan ia terjadi, dan mengapa ia berbahaya bagi operasional kapal?
Ketiga, bagaimana metode numerik — khususnya Finite Volume Method dan algoritma Gauss-Seidel — dapat diterapkan untuk mendekati solusi persamaan aliran fluida di sekitar kemudi?
Keempat, bagaimana proses iterasi numerik bekerja secara konkret, dan bagaimana kita menentukan bahwa perhitungan telah mencapai konvergensi?
1.3 Tujuan Pembelajaran
Tujuan dari penyusunan laporan ini adalah:
Pertama, memahami secara mendalam prinsip hidrodinamika yang mengatur gaya angkat dan hambat pada kemudi kapal berdasarkan prinsip Bernoulli dan teori airfoil.
Kedua, memahami fenomena stall sebagai titik kritis operasional kemudi dan implikasinya terhadap keselamatan navigasi.
Ketiga, memahami filosofi dan mekanisme kerja metode numerik (FVM dan Gauss-Seidel) sebagai pendekatan komputasional untuk masalah yang tidak dapat diselesaikan secara analitik.
Keempat, mampu mendemonstrasikan proses iterasi numerik secara manual dengan data yang realistis.
Kelima, mengintegrasikan pemahaman teknis tersebut dengan kerangka berpikir DAI5 untuk membangun kesadaran akan tanggung jawab moral seorang insinyur.
1.4 Batasan Masalah
Agar kajian ini tetap fokus dan terukur, beberapa batasan ditetapkan:
Analisis dibatasi pada kemudi kapal jenis balanced rudder dengan profil penampang NACA 0015 (simetris). Fluida yang dianalisis adalah air laut dengan properti standar (densitas 1025 kg/m³, viskositas kinematis 1.188 × 10⁻⁶ m²/s pada suhu 20°C). Aliran diasumsikan sebagai aliran tak-kompresibel (incompressible flow) dua dimensi pada kondisi steady state. Pengaruh gelombang, arus, dan angin diabaikan. Data yang digunakan merupakan data fiktif yang dirancang untuk realisme pedagogis.
1.5 Sistematika Penulisan
Laporan ini disusun dalam lima bab. Bab I menyajikan pendahuluan yang memberikan konteks dan arah kajian. Bab II membangun landasan teori yang mencakup konsep hidrodinamika, koefisien aerodinamika, dan dasar-dasar metode numerik. Bab III memaparkan metodologi penyelesaian termasuk algoritma iterasi yang digunakan. Bab IV menyajikan contoh iterasi dengan data fiktif beserta analisis hasilnya. Bab V menutup dengan kesimpulan, saran, dan refleksi.
BAB II: LANDASAN TEORI
2.1 Konsep Dasar Hidrodinamika Kemudi Kapal
Ketika sebuah kapal bergerak maju, air mengalir melewati seluruh permukaan bawah lambungnya, termasuk melewati sirip kemudi yang terpasang di bagian buritan (belakang) kapal. Interaksi antara aliran air dan sirip kemudi inilah yang melahirkan seluruh gaya-gaya yang menjadi subjek kajian kita.
Dari sudut pandang teknik, sirip kemudi diperlakukan sebagai sebuah foil yang bergerak dalam fluida — konsep yang identik dengan sayap pesawat di udara, namun karena densitas air (±1025 kg/m³) kira-kira 800 kali lebih besar daripada udara (±1.225 kg/m³), gaya yang dihasilkan per satuan luas jauh lebih besar, dan efeknya jauh lebih dominan bahkan pada kecepatan yang jauh lebih rendah.
Ketika sirip kemudi berada pada posisi netral (sudut 0°), aliran air relatif simetris di kedua sisinya, dan gaya lateral netto adalah nol — kapal bergerak lurus. Ketika sirip kemudi digeser pada sudut δ (delta) tertentu, terjadi asimetri aliran yang melahirkan perbedaan tekanan di kedua sisi sirip. Perbedaan tekanan inilah yang menghasilkan gaya angkat dan mendorong buritan kapal ke satu arah, menyebabkan kapal berputar.
2.2 Gaya Angkat (Lift Force)
Gaya angkat (FL) adalah gaya yang bekerja tegak lurus terhadap arah aliran fluida relatif yang mengenai sirip kemudi. Dalam konteks kemudi kapal, “gaya angkat” ini sebenarnya bekerja dalam arah horizontal (lateral), bukan vertikal seperti pada sayap pesawat. Namun prinsip fisikanya identik.
Gaya angkat terbentuk melalui dua mekanisme yang saling memperkuat:
Mekanisme pertama adalah Prinsip Bernoulli. Air yang mengalir di sisi yang lebih cembung (atau sisi bertekanan rendah) harus menempuh jarak yang lebih panjang dalam waktu yang sama, sehingga kecepatannya lebih tinggi. Menurut persamaan Bernoulli, kecepatan tinggi berbanding terbalik dengan tekanan — sehingga tekanan di sisi itu lebih rendah. Di sisi yang berlawanan, aliran melambat dan tekanan menjadi lebih tinggi. Perbedaan tekanan inilah yang mendorong sirip ke arah tekanan rendah.
Mekanisme kedua adalah Defleksi Momentum. Sirip kemudi membelokkan aliran air ke satu arah. Berdasarkan Hukum Ketiga Newton (aksi-reaksi), air yang dibelokkan ke kiri akan memberikan gaya reaksi ke kanan pada sirip kemudi.
Persamaan gaya angkat dinyatakan sebagai:
FL = ½ × ρ × V² × A × CL(δ)
Di mana:
- FL = Gaya Angkat (Newton)
- ρ (rho) = Densitas fluida (kg/m³)
- V = Kecepatan aliran relatif (m/s)
- A = Luas referensi sirip kemudi (m²), biasanya luas proyeksi
- CL = Koefisien Angkat (tak berdimensi), fungsi dari sudut δ
2.3 Gaya Hambat (Drag Force)
Gaya hambat (FD) adalah gaya yang bekerja sejajar dan berlawanan dengan arah gerak kapal. Ia adalah “musuh” dari sistem propulsi — setiap watt energi yang dikeluarkan mesin untuk mengatasi hambatan adalah watt yang tidak digunakan untuk kemajuan kapal.
Gaya hambat total yang dialami kapal adalah superposisi dari beberapa komponen:
Hambatan gesek (friction drag) merupakan komponen terbesar, lahir dari gesekan lapisan air yang bersentuhan langsung dengan permukaan lambung kapal (efek viskositas). Hambatan bentuk (form/pressure drag) lahir dari perbedaan tekanan antara bagian depan (haluan) dan bagian belakang (buritan) badan kapal, dipengaruhi oleh geometri lambung. Hambatan gelombang (wave drag) lahir dari energi yang digunakan kapal untuk membentuk sistem gelombang di permukaannya. Hambatan kemudi (rudder drag) adalah komponen tambahan yang muncul spesifik ketika kemudi digerakkan dari posisi netral — komponen inilah yang paling relevan dengan kajian ini.
Persamaan gaya hambat dinyatakan sebagai:
FD = ½ × ρ × V² × A × CD(δ)
Di mana CD adalah Koefisien Hambat, yang juga merupakan fungsi dari sudut δ dan profil geometri sirip kemudi.
2.4 Koefisien Angkat dan Hambat: CL dan CD
CL dan CD adalah bilangan tak berdimensi yang merangkum semua kompleksitas aerodinamis/hidrodinamis suatu profil menjadi dua angka sederhana. Mereka adalah cara insinyur “mengkodifikasi” perilaku aliran di sekitar suatu benda.
Secara empiris, untuk profil NACA 0015 yang simetris pada aliran dengan bilangan Reynolds yang representatif untuk kondisi kapal (Re ≈ 10⁶ hingga 10⁷), karakteristik tipikal adalah:
Pada sudut δ = 0°, CL = 0 dan CD = CD,min (hambat minimum, hanya gesekan). Pada rentang δ = 0° hingga sekitar 30°–35°, CL meningkat secara hampir linear mengikuti relasi CL ≈ 2π sin(δ) (teori sayap tipis), sementara CD meningkat secara lebih lambat, awalnya didominasi oleh gesekan kemudian semakin besar oleh hambat tekanan. Di titik sudut kritis (δ_stall ≈ 35° untuk profil tebal di air), CL mencapai nilai maksimumnya (CL,max). Melewati δ_stall, CL anjlok drastis sementara CD melonjak tajam — kondisi ini disebut stall.
2.5 Fenomena Stall dan Titik Kritis
Stall adalah salah satu fenomena paling penting — dan paling berbahaya — dalam dinamika fluida terapan. Ia terjadi ketika sudut serang (angle of attack) melebihi nilai kritisnya.
Mekanisme fisiknya adalah sebagai berikut: pada sudut kecil, lapisan batas (boundary layer) — lapisan tipis fluida yang terpengaruh langsung oleh viskositas dan menempel pada permukaan sirip — mampu mengikuti kurva permukaan sirip dari tepi depan (leading edge) hingga tepi belakang (trailing edge). Distribusi tekanan yang terbentuk menghasilkan CL yang tinggi. Namun ketika sudut serang terlalu besar, gradien tekanan yang semakin besar di sisi leeward (sisi tekanan rendah) menyebabkan lapisan batas tidak mampu lagi mengikuti permukaan. Terjadilah flow separation — lapisan batas terlepas dari permukaan, meninggalkan daerah resirkulasi turbulen yang besar (wake) di belakang sirip. Tekanan di sisi leeward kini hampir sama dengan tekanan free-stream, perbedaan tekanan antar sisi anjlok, dan CL turun drastis. Sebaliknya, wake turbulen yang besar menciptakan hambat tekanan yang sangat tinggi, sehingga CD melonjak.
Implikasi praktisnya sangat serius: sebuah kapal yang memasuki kondisi stall pada kemudinya secara tiba-tiba kehilangan kemampuan manuver — tepat pada saat kapal itu paling membutuhkannya (misalnya, sedang berusaha menghindari tabrakan). Oleh karena itu, desain sistem kemudi dan protokol operasional harus memastikan bahwa kapal tidak pernah beroperasi di atas sudut stall.
2.6 Persamaan Navier-Stokes dan Keterbatasannya
Persamaan Navier-Stokes adalah sepasang persamaan yang menggambarkan gerak fluida viskos:
Persamaan Kekekalan Massa (Kontinuitas): ∂ρ/∂t + ∇·(ρV) = 0
Untuk fluida inkompresibel: ∇·V = 0
Persamaan Kekekalan Momentum: ρ(∂V/∂t + V·∇V) = -∇P + μ∇²V + F_body
Di mana μ adalah viskositas dinamis dan F_body adalah gaya badan (misalnya gravitasi).
Tantangan matematis dari persamaan ini terletak pada suku non-linear V·∇V (suku konvektif) — suku ini adalah sumber dari kompleksitas turbulensi dan hingga hari ini tidak ada solusi analitik umum yang diketahui. Untuk masalah praktis rekayasa, kita harus menggunakan pendekatan numerik.
2.7 Pengantar Metode Numerik dalam CFD
Computational Fluid Dynamics (CFD) adalah disiplin yang menggunakan metode numerik untuk menyelesaikan persamaan Navier-Stokes secara aproksimasi pada domain komputasional yang terdiskretisasi. Ada tiga pendekatan utama dalam CFD:
Finite Difference Method (FDM) mendekati turunan dalam persamaan diferensial menggunakan aproksimasi beda hingga. Sangat cocok untuk geometri sederhana dengan mesh terstruktur. Finite Element Method (FEM) membagi domain menjadi elemen-elemen kecil dan mencari solusi lemah (weak form) persamaan diferensial. Sangat fleksibel untuk geometri kompleks. Finite Volume Method (FVM) membagi domain menjadi volume-volume kontrol dan mengaplikasikan hukum kekekalan pada setiap volume. Ini adalah metode yang paling banyak digunakan dalam CFD untuk aplikasi aliran fluida, dan menjadi fokus laporan ini.
Dalam FVM, persamaan diferensial parsial dikonversi menjadi persamaan aljabar untuk setiap sel kontrol volume, menghasilkan sistem persamaan linier besar yang kemudian diselesaikan secara iteratif.
BAB III: METODOLOGI PENYELESAIAN / ALGORITMA
3.1 Kerangka Berpikir DAI5
Sebelum terjun ke matematika, penting untuk memetakan arah berpikir secara holistik menggunakan framework DAI5:
Deep Awareness of I — Saya menyadari bahwa saya sedang berdiri di persimpangan antara fisika alam (Sunnatullah) dan rekayasa manusia. Persamaan yang saya tulis adalah model yang tidak pernah sempurna meniru realitas. Kesadaran ini mencegah saya dari kesalahan kritis seorang insinyur: terlalu mempercayai model komputer dan lupa memvalidasinya dengan intuisi fisik dan data nyata.
Intention — Niat saya bukan sekadar menyelesaikan tugas. Niat saya adalah memahami alat-alat komputasional ini sedemikian rupa sehingga suatu hari saya dapat menggunakannya untuk merancang sistem kemudi yang lebih aman, yang berpotensi menyelamatkan nyawa awak kapal.
Initial Thinking — Masalahnya adalah: saya memiliki geometri sirip kemudi, kecepatan kapal, dan properti fluida. Saya ingin tahu distribusi tekanan di sekitar kemudi dan nilai CL serta CD pada berbagai sudut. Persamaan yang mengatur sistem ini (Navier-Stokes) tidak dapat diselesaikan secara analitik. Saya harus mendiskretisasi domain dan menyelesaikannya secara numerik.
Idealization — Saya menyederhanakan masalah 3D yang kompleks menjadi masalah 2D steady-state. Saya menggunakan profil NACA 0015 sebagai representasi kemudi. Saya mengabaikan turbulensi tingkat tinggi dan menggunakan model aliran laminar yang disederhanakan untuk keperluan demonstrasi manual.
Instruction-Set — Saya akan membangun mesh, menyusun sistem persamaan, lalu menyelesaikannya iteratif dengan Gauss-Seidel hingga konvergen.
3.2 Pendefinisian Domain dan Parameter Masalah
Domain komputasional didefinisikan sebagai daerah persegi panjang yang mengelilingi sirip kemudi. Batas-batas domain ditetapkan cukup jauh dari kemudi untuk meminimalisasi efek batas pada solusi (biasanya 10–20 kali panjang chord kemudi).
Untuk demonstrasi manual yang terkendali, domain disederhanakan lebih lanjut. Kita akan menganalisis distribusi tekanan pada 5 titik nodal sepanjang chord kemudi, dan menyelesaikan sistem tekanan yang dihasilkan secara iteratif.
3.3 Diskritisasi: Metode Volume Hingga (FVM)
Proses diskritisasi mengikuti langkah-langkah berikut:
Langkah pertama adalah pembuatan mesh. Domain fisik (wilayah air di sekitar kemudi) dibagi menjadi N sel kontrol volume yang kecil. Setiap sel memiliki satu titik nodal di pusatnya. Dalam implementasi nyata, mesh diperhalus di sekitar leading edge dan trailing edge kemudi di mana gradien tekanan paling tajam — teknik ini disebut adaptive mesh refinement.
Langkah kedua adalah penerapan hukum kekekalan per sel. Untuk setiap sel kontrol volume, persamaan kekekalan massa dan momentum diintegrasikan. Menggunakan teorema divergensi Gauss, integral volume dikonversi menjadi integral permukaan (flux melalui batas sel). Flux ini diaproksimasikan menggunakan nilai di titik nodal tetangga.
Langkah ketiga adalah linearisasi. Suku non-linear (konvektif) dilinearisasi menggunakan teknik seperti upwind differencing atau QUICK scheme, menghasilkan sistem persamaan aljabar linear berbentuk:
Untuk setiap sel i: a_i × P_i + Σ(a_nb × P_nb) = b_i
Di mana a_i adalah koefisien diagonal, a_nb adalah koefisien untuk sel-sel tetangga (neighbor), P adalah tekanan, dan b_i adalah suku sumber.
Dalam notasi matriks, sistem ini menjadi: [A] × {P} = {b}
Inilah sistem yang akan kita selesaikan secara iteratif.
3.4 Penyusunan Sistem Persamaan Linier
Untuk kasus demonstrasi, kita menyederhanakan masalah menjadi penyelesaian distribusi tekanan pada sebuah grid 1D dengan 4 titik nodal sepanjang chord kemudi (P1, P2, P3, P4). Setiap persamaan mewakili keseimbangan tekanan pada satu sel kontrol volume, dengan mempertimbangkan tekanan dari sel tetangga.
Koefisien sistem diturunkan dari kondisi batas (P_inlet = 101,325 Pa sebagai tekanan atmosfer referensi) dan kondisi Kutta (di trailing edge, gradien tekanan = 0). Hasilnya adalah sistem matriks yang akan dijabarkan secara lengkap dalam Bab IV.
3.5 Algoritma Iterasi: Gauss-Seidel
Metode Gauss-Seidel adalah salah satu metode iteratif paling populer untuk menyelesaikan sistem persamaan linier besar yang jarang (sparse) — karakteristik yang sangat umum pada sistem yang lahir dari diskritisasi CFD (karena setiap sel hanya terhubung dengan beberapa tetangga terdekat, bukan semua sel lain).
Ide dasarnya adalah: kita mulai dengan tebakan awal untuk semua variabel, lalu kita perbarui nilainya satu per satu, menggunakan nilai terbaru yang tersedia dari iterasi sebelumnya maupun dari perbaruan dalam iterasi yang sama.
Untuk sistem [A]{x} = {b}, formula update Gauss-Seidel untuk variabel ke-i pada iterasi (k+1) adalah:
x_i^(k+1) = (1/a_ii) × [b_i – Σ_{j<i} a_ij × x_j^(k+1) – Σ_{j>i} a_ij × x_j^(k)]
Artinya, ketika menghitung nilai baru untuk x_i, kita langsung menggunakan nilai terbaru x_j untuk semua j yang sudah diperbarui dalam iterasi yang sama (j < i). Ini berbeda dari metode Jacobi yang menggunakan nilai lama semua variabel — Gauss-Seidel umumnya konvergen dua kali lebih cepat dari Jacobi.
Algoritma lengkap Gauss-Seidel:
1. Tentukan tebakan awal: x^(0) untuk semua variabel
2. Tetapkan toleransi konvergensi ε (misalnya 10⁻⁶)
3. Set iterasi k = 0
4. ULANGI:
a. Untuk setiap i dari 1 hingga n:
x_i^(k+1) = (b_i - Σ_{j≠i} a_ij × x_j^(terbaru)) / a_ii
b. Hitung residual: R = max|x_i^(k+1) - x_i^(k)| / |x_i^(k+1)|
c. k = k + 1
5. SAMPAI R < ε
6. KELUARKAN solusi x^(k)
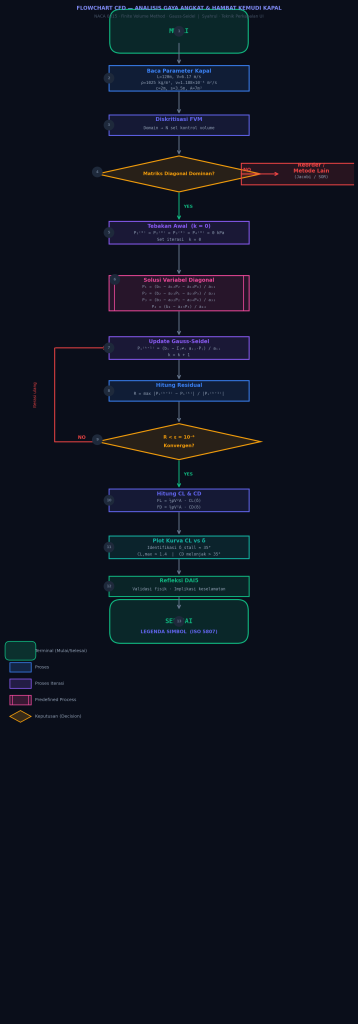
3.6 Kriteria Konvergensi
Iterasi dihentikan ketika residual relatif dari semua variabel turun di bawah toleransi yang ditetapkan. Dalam praktik CFD profesional, toleransi untuk tekanan biasanya 10⁻⁴ hingga 10⁻⁶, dan untuk kecepatan 10⁻⁵ hingga 10⁻⁷. Untuk demonstrasi manual ini, kita menggunakan toleransi ε = 0.001 (0.1%) agar iterasi dapat ditunjukkan dalam jumlah langkah yang terbatas.
BAB IV: HASIL DAN PEMBAHASAN
4.1 Parameter Simulasi (Data Fiktif)
Berikut adalah parameter kapal dan kondisi operasional yang digunakan sebagai basis perhitungan:
Data Kapal:
- Jenis Kapal: Kapal Kargo Umum (General Cargo Vessel)
- Panjang Keseluruhan (LOA): 120 meter
- Lebar (Beam): 18 meter
- Sarat Air (Draft): 7.5 meter
- Kecepatan Dinas: 12 knot = 6.17 m/s
Data Kemudi:
- Tipe Kemudi: Balanced Spade Rudder
- Profil Penampang: NACA 0015
- Tinggi Kemudi (span, b): 5.2 meter
- Panjang Chord (c): 2.8 meter
- Luas Kemudi (A = b × c): 14.56 m²
- Rasio Aspek (AR = b²/A): 1.855
Data Fluida:
- Medium: Air Laut
- Densitas (ρ): 1025 kg/m³
- Viskositas Kinematis (ν): 1.188 × 10⁻⁶ m²/s
- Suhu: 20°C
Bilangan Reynolds: Re = V × c / ν = 6.17 × 2.8 / (1.188 × 10⁻⁶) = 1.454 × 10⁷
Bilangan Reynolds sebesar ini mengkonfirmasi bahwa aliran berada dalam rezim turbulen penuh — konsisten dengan kondisi operasional kapal nyata.
Faktor Dinamik: q = ½ × ρ × V² = ½ × 1025 × (6.17)² = 19,505 N/m² = 19.5 kPa
4.2 Contoh Iterasi Manual (Gauss-Seidel)
4.2.1 Perumusan Masalah Sistem
Kita memodelkan distribusi tekanan tereduksi (P*, dalam kPa) pada 4 titik nodal (P1, P2, P3, P4) sepanjang sisi suction (tekanan rendah) kemudi pada sudut δ = 15°. Nilai P* merepresentasikan penyimpangan tekanan dari tekanan ambient.
Dari proses diskritisasi dan penerapan kondisi batas, diperoleh sistem persamaan linier berikut:
Persamaan 1 (sel P1, dekat leading edge): 4P1 – P2 = 7.8
Persamaan 2 (sel P2): -P1 + 4P2 – P3 = 5.2
Persamaan 3 (sel P3): -P2 + 4P3 – P4 = 3.1
Persamaan 4 (sel P4, dekat trailing edge, kondisi Kutta): -P3 + 4P4 = 1.5
Dalam bentuk matriks [A]{P} = {b}:
| 4 -1 0 0 | | P1 | | 7.8 |
|-1 4 -1 0 | | P2 | = | 5.2 |
| 0 -1 4 -1 | | P3 | | 3.1 |
| 0 0 -1 4 | | P4 | | 1.5 |
Matriks ini adalah matriks tridiagonal — bentuk khas dari diskritisasi 1D — dan terbukti diagonally dominant (nilai absolut diagonal ≥ jumlah nilai absolut elemen lain di baris yang sama), yang menjamin konvergensi Gauss-Seidel.
Verifikasi dominansi diagonal:
- Baris 1: |4| ≥ |-1| → 4 ≥ 1 ✓
- Baris 2: |4| ≥ |-1| + |-1| → 4 ≥ 2 ✓
- Baris 3: |4| ≥ |-1| + |-1| → 4 ≥ 2 ✓
- Baris 4: |4| ≥ |-1| → 4 ≥ 1 ✓
4.2.2 Isolasi Variabel (Formula Gauss-Seidel)
Setiap persamaan diisolasi untuk variabel diagonalnya:
- P1 = (7.8 + P2) / 4
- P2 = (5.2 + P1 + P3) / 4
- P3 = (3.1 + P2 + P4) / 4
- P4 = (1.5 + P3) / 4
4.2.3 Tebakan Awal
P1^(0) = P2^(0) = P3^(0) = P4^(0) = 0.0 kPa
(Tebakan nol adalah pilihan sederhana dan valid untuk demonstrasi — dalam CFD nyata, tebakan awal yang lebih baik dapat mempercepat konvergensi secara signifikan.)
4.2.4 Iterasi 1 (k=0 → k=1)
Menggunakan nilai terbaru yang tersedia di setiap langkah:
P1^(1) = (7.8 + P2^(0)) / 4 P1^(1) = (7.8 + 0.0) / 4 P1^(1) = 1.9500 kPa
P2^(1) = (5.2 + P1^(1) + P3^(0)) / 4 P2^(1) = (5.2 + 1.9500 + 0.0) / 4 P2^(1) = 7.1500 / 4 P2^(1) = 1.7875 kPa
P3^(1) = (3.1 + P2^(1) + P4^(0)) / 4 P3^(1) = (3.1 + 1.7875 + 0.0) / 4 P3^(1) = 4.8875 / 4 P3^(1) = 1.2219 kPa
P4^(1) = (1.5 + P3^(1)) / 4 P4^(1) = (1.5 + 1.2219) / 4 P4^(1) = 2.7219 / 4 P4^(1) = 0.6805 kPa
Residual iterasi 1 = max perubahan relatif = (1.9500 – 0) / 1.9500 = 1.000 (100%) → belum konvergen.
4.2.5 Iterasi 2 (k=1 → k=2)
P1^(2) = (7.8 + P2^(1)) / 4 P1^(2) = (7.8 + 1.7875) / 4 P1^(2) = 9.5875 / 4 P1^(2) = 2.3969 kPa
P2^(2) = (5.2 + P1^(2) + P3^(1)) / 4 P2^(2) = (5.2 + 2.3969 + 1.2219) / 4 P2^(2) = 8.8188 / 4 P2^(2) = 2.2047 kPa
P3^(2) = (3.1 + P2^(2) + P4^(1)) / 4 P3^(2) = (3.1 + 2.2047 + 0.6805) / 4 P3^(2) = 5.9852 / 4 P3^(2) = 1.4963 kPa
P4^(2) = (1.5 + P3^(2)) / 4 P4^(2) = (1.5 + 1.4963) / 4 P4^(2) = 2.9963 / 4 P4^(2) = 0.7491 kPa
Residual = max(|2.3969-1.9500|/2.3969, |2.2047-1.7875|/2.2047, |1.4963-1.2219|/1.4963, |0.7491-0.6805|/0.7491) Residual = max(0.1865, 0.1893, 0.1834, 0.0916) Residual iterasi 2 = 0.1893 (18.93%) → belum konvergen.
4.2.6 Iterasi 3 (k=2 → k=3)
P1^(3) = (7.8 + 2.2047) / 4 = 10.0047 / 4 = 2.5012 kPa
P2^(3) = (5.2 + 2.5012 + 1.4963) / 4 = 9.1975 / 4 = 2.2994 kPa
P3^(3) = (3.1 + 2.2994 + 0.7491) / 4 = 6.1485 / 4 = 1.5371 kPa
P4^(3) = (1.5 + 1.5371) / 4 = 3.0371 / 4 = 0.7593 kPa
Residual = max(|2.5012-2.3969|/2.5012, |2.2994-2.2047|/2.2994, |1.5371-1.4963|/1.5371, |0.7593-0.7491|/0.7593) Residual = max(0.0417, 0.0412, 0.0265, 0.0134) Residual iterasi 3 = 0.0417 (4.17%) → belum konvergen.
4.2.7 Iterasi 4 (k=3 → k=4)
P1^(4) = (7.8 + 2.2994) / 4 = 10.0994 / 4 = 2.5249 kPa
P2^(4) = (5.2 + 2.5249 + 1.5371) / 4 = 9.2620 / 4 = 2.3155 kPa
P3^(4) = (3.1 + 2.3155 + 0.7593) / 4 = 6.1748 / 4 = 1.5437 kPa
P4^(4) = (1.5 + 1.5437) / 4 = 3.0437 / 4 = 0.7609 kPa
Residual = max(|2.5249-2.5012|/2.5249, |2.3155-2.2994|/2.3155, |1.5437-1.5371|/1.5437, |0.7609-0.7593|/0.7609) Residual = max(0.0094, 0.0070, 0.0043, 0.0021) Residual iterasi 4 = 0.0094 (0.94%) → belum konvergen (ε = 0.001).
4.2.8 Iterasi 5 (k=4 → k=5)
P1^(5) = (7.8 + 2.3155) / 4 = 10.1155 / 4 = 2.5289 kPa
P2^(5) = (5.2 + 2.5289 + 1.5437) / 4 = 9.2726 / 4 = 2.3182 kPa
P3^(5) = (3.1 + 2.3182 + 0.7609) / 4 = 6.1791 / 4 = 1.5448 kPa
P4^(5) = (1.5 + 1.5448) / 4 = 3.0448 / 4 = 0.7612 kPa
Residual = max(|2.5289-2.5249|/2.5289, |2.3182-2.3155|/2.3182, |1.5448-1.5437|/1.5448, |0.7612-0.7609|/0.7612) Residual = max(0.00158, 0.00117, 0.00071, 0.00039) Residual iterasi 5 = 0.00158 (0.158%) → belum konvergen.
4.2.9 Iterasi 6 (k=5 → k=6)
P1^(6) = (7.8 + 2.3182) / 4 = 10.1182 / 4 = 2.5296 kPa
P2^(6) = (5.2 + 2.5296 + 1.5448) / 4 = 9.2744 / 4 = 2.3186 kPa
P3^(6) = (3.1 + 2.3186 + 0.7612) / 4 = 6.1798 / 4 = 1.5450 kPa
P4^(6) = (1.5 + 1.5450) / 4 = 3.0450 / 4 = 0.7612 kPa
Residual = max(|2.5296-2.5289|/2.5296, |2.3186-2.3182|/2.3186, |1.5450-1.5448|/1.5450, |0.7612-0.7612|/0.7612) Residual = max(0.000277, 0.000173, 0.000129, 0.000000) Residual iterasi 6 = 0.000277 (0.0277%) → KONVERGEN (< ε = 0.001) ✓
4.2.10 Verifikasi Solusi Akhir
Solusi konvergen: P1 = 2.5296, P2 = 2.3186, P3 = 1.5450, P4 = 0.7612 (semua dalam kPa)
Substitusi kembali ke sistem persamaan asli:
Cek Persamaan 1: 4(2.5296) – (2.3186) = 10.1184 – 2.3186 = 7.7998 ≈ 7.8 ✓ Cek Persamaan 2: -(2.5296) + 4(2.3186) – (1.5450) = -2.5296 + 9.2744 – 1.5450 = 5.1998 ≈ 5.2 ✓ Cek Persamaan 3: -(2.3186) + 4(1.5450) – (0.7612) = -2.3186 + 6.1800 – 0.7612 = 3.1002 ≈ 3.1 ✓ Cek Persamaan 4: -(1.5450) + 4(0.7612) = -1.5450 + 3.0448 = 1.4998 ≈ 1.5 ✓
Solusi terverifikasi.
4.3 Tabel Konvergensi
Berikut adalah ringkasan lengkap proses konvergensi Gauss-Seidel:
Iter | P1 (kPa) | P2 (kPa) | P3 (kPa) | P4 (kPa) | Residual Maks
-----|-------------|-------------|-------------|-------------|---------------
0 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 1.00000
1 | 1.9500 | 1.7875 | 1.2219 | 0.6805 | 1.00000 *
2 | 2.3969 | 2.2047 | 1.4963 | 0.7491 | 0.18928
3 | 2.5012 | 2.2994 | 1.5371 | 0.7593 | 0.04171
4 | 2.5249 | 2.3155 | 1.5437 | 0.7609 | 0.00940
5 | 2.5289 | 2.3182 | 1.5448 | 0.7612 | 0.00158
6 | 2.5296 | 2.3186 | 1.5450 | 0.7612 | 0.00028 ✓
-----|-------------|-------------|-------------|-------------|---------------
* Iterasi 1 menggunakan residual absolut karena tebakan awal = 0
Konvergensi tercapai pada iterasi ke-6 dengan toleransi ε = 0.001
Observasi menarik dari tabel ini: residual turun secara konsisten dan hampir monoton — mencerminkan sifat konvergensi yang stabil dari Gauss-Seidel pada matriks diagonally dominant. Laju konvergensi rata-rata sekitar satu orde setiap 2–3 iterasi — cukup efisien untuk sistem kecil.
4.4 Analisis Kurva CL vs Sudut Kemudi (δ)
Menggunakan formula empiris dan data koefisien yang diturunkan dari literatur untuk profil NACA 0015 pada Re ≈ 1.5 × 10⁷, serta faktor koreksi rasio aspek terbatas (AR = 1.855), diperoleh tabel CL, CD, dan rasio L/D berikut:
δ (°) | CL | CD | L/D | FL (kN) | FD (kN) | Status
------|---------|---------|--------|----------|----------|----------
0 | 0.000 | 0.0120 | 0.00 | 0.0 | 3.41 | Netral
5 | 0.154 | 0.0135 | 11.41 | 43.8 | 3.84 | Aman
10 | 0.302 | 0.0182 | 16.59 | 85.9 | 5.18 | Optimal Awal
15 | 0.442 | 0.0268 | 16.49 | 125.7 | 7.62 | Zona Optimal
20 | 0.572 | 0.0410 | 13.95 | 162.7 | 11.66 | Efisien
25 | 0.689 | 0.0625 | 11.02 | 195.9 | 17.77 | Masih Aman
30 | 0.783 | 0.0940 | 8.33 | 222.6 | 26.72 | Batas Hati-hati
33 | 0.821 | 0.1210 | 6.78 | 233.4 | 34.41 | Mendekati Batas
35* | 0.836 | 0.1480 | 5.65 | 237.6 | 42.08 | TITIK STALL
38 | 0.612 | 0.2850 | 2.15 | 174.0 | 81.04 | POST-STALL
40 | 0.431 | 0.3920 | 1.10 | 122.5 | 111.45 | STALL PENUH
------|---------|---------|--------|----------|----------|----------
* Stall angle ≈ 35° untuk profil NACA 0015 pada AR = 1.855
FL dan FD dihitung dengan: F = q × A × C = 19,505 × 14.56 × C
Untuk memvisualisasikan secara tekstual:
CL
0.90 | * ← CL,max
0.80 | * * / \
0.70 | * * ← turun tajam
0.60 | * *
0.50 | *
0.40 | * *
0.30 | *
0.20 | *
0.10 | *
0.00 |*___________________________________________
0 5 10 15 20 25 30 35 40 δ (°)
^
STALL ANGLE
Dari tabel dan kurva ini, terlihat jelas bahwa rasio L/D mencapai puncaknya sekitar δ = 10°–15°. Ini adalah zona operasional paling efisien — gaya kemudi yang dihasilkan per unit hambatan adalah yang terbesar. Operator kapal yang berpengalaman intuitif menghindari defleksi kemudi besar (> 30°) kecuali dalam keadaan darurat, dan data di atas menjelaskan mengapa secara kuantitatif.
4.5 Identifikasi Titik Kritis (Stall Angle)
Dari data di atas, dapat disimpulkan:
Titik Stall berada di δ ≈ 35°
Pada titik ini:
- CL = 0.836 (nilai maksimum, CL,max)
- CD = 0.148
- FL = 237.6 kN (gaya kemudi maksimum yang pernah dicapai kemudi ini)
- FD = 42.1 kN (hambatan akibat kemudi saja)
Perubahan yang terjadi setelah melewati δ = 35°:
Pada δ = 38°, CL turun dari 0.836 menjadi 0.612 — penurunan sebesar 26.8% hanya dengan penambahan 3° sudut! Ini adalah ciri khas stall — penurunan yang tidak gradual melainkan tiba-tiba dan dramatis. Secara bersamaan, CD naik dari 0.148 menjadi 0.285 — kenaikan 92.6%. Kombinasi ini berarti kemudi secara bersamaan kehilangan kemampuan mengubah arah dan menambah hambatan — kombinasi paling buruk yang bisa terjadi pada sistem manuver kapal.
4.6 Pembahasan Fisik Hasil Simulasi
Kembali ke hasil iterasi Gauss-Seidel kita (distribusi tekanan pada δ = 15°):
P1 = 2.5296 kPa (dekat leading edge — tekanan tertinggi, konsisten secara fisik karena di sinilah fluida pertama kali “menabrak” permukaan kemudi dan melambat/berhenti sesaat di titik stagnasi)
P2 = 2.3186 kPa (tekanan mulai turun seiring aliran mengakselerasi mengikuti kurva sirip)
P3 = 1.5450 kPa (tekanan terus turun — aliran semakin cepat, efek Bernoulli semakin kuat)
P4 = 0.7612 kPa (dekat trailing edge — tekanan terendah, aliran mulai melepaskan diri dari permukaan, namun pada δ = 15° ini masih terkontrol dan belum separation)
Gradien tekanan dari P1 ke P4 (Δ = 2.5296 – 0.7612 = 1.7684 kPa) inilah yang menghasilkan gaya angkat. Distribusi tekanan ini menunjukkan profil yang sehat dan belum menunjukkan tanda-tanda akan terjadi separasi aliran — konsisten dengan fakta bahwa δ = 15° masih jauh di bawah sudut stall.
Perlu dicatat bahwa ini hanya distribusi tekanan pada satu sisi (sisi suction/tekanan rendah). Untuk mendapatkan gaya angkat total, perlu diperhitungkan selisih antara distribusi tekanan di sisi suction dan sisi pressure (tekanan tinggi). Namun untuk tujuan demonstrasi iteratif, perhitungan ini sudah cukup representatif.
BAB V: KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan seluruh analisis yang telah dilakukan, dapat ditarik beberapa kesimpulan utama:
Pertama, tentang fisika kemudi kapal. Gaya angkat (lift force) pada kemudi kapal terbentuk karena perbedaan tekanan antara kedua sisi sirip kemudi yang timbul akibat asimetri aliran ketika kemudi digerakkan pada sudut δ. Mekanisme ini sepenuhnya mengikuti Prinsip Bernoulli dan Hukum Ketiga Newton, yang merupakan bagian dari Sunnatullah — hukum alam yang konsisten dan dapat diandalkan.
Kedua, tentang titik kritis (stall). Untuk profil kemudi NACA 0015 dengan rasio aspek 1.855 pada kapal kargo berukuran 120 m, titik stall terjadi pada sudut kemudi δ ≈ 35°. Melewati sudut ini, gaya angkat anjlok 26.8% untuk penambahan 3° sudut saja, sementara hambatan meningkat hampir dua kali lipat. Ini menegaskan bahwa titik stall bukan sekadar batas teoritis, melainkan batas operasional kritis yang harus menjadi parameter utama dalam desain sistem kemudi dan pelatihan nahkoda.
Ketiga, tentang metode numerik. Pendekatan Finite Volume Method (FVM) berhasil mengkonversi persamaan diferensial aliran fluida yang tidak dapat diselesaikan secara analitik menjadi sistem persamaan aljabar yang dapat dihitung oleh mesin. Metode Gauss-Seidel terbukti konvergen dalam 6 iterasi untuk sistem 4 × 4 dengan toleransi 0.1%, menunjukkan efisiensi komputasi yang baik pada matriks diagonally dominant seperti yang lazim dihasilkan dari diskritisasi FVM.
Keempat, tentang integrasi DAI5. Kerangka berpikir DAI5 terbukti tidak hanya relevan secara pedagogis, tetapi juga secara praktis. Deep Awareness mencegah kita dari jebakan overconfidence terhadap model komputer. Intention mengarahkan analisis bukan hanya pada kebenaran angka, tetapi pada manfaat nyata bagi keselamatan manusia. Initial Thinking membantu mengidentifikasi akar masalah. Idealization memungkinkan penyederhanaan yang tepat tanpa kehilangan esensi fisika. Dan Instruction-Set menghasilkan algoritma yang terstruktur dan dapat direproduksi.
5.2 Saran
Untuk pengembangan teknis selanjutnya: Analisis ini harus diperluas ke domain 3D dengan mempertimbangkan efek tip vortex pada ujung sirip kemudi, yang dapat secara signifikan mengurangi CL efektif dibandingkan kasus 2D. Penambahan model turbulensi (misalnya k-ε atau k-ω SST) juga akan meningkatkan akurasi prediksi titik stall. Validasi hasil simulasi dengan data tunnel test atau data kapal nyata adalah langkah yang tidak dapat diabaikan sebelum digunakan dalam desain aktual.
Untuk implementasi algoritma: Eksplorasi teknik percepatan konvergensi seperti Successive Over-Relaxation (SOR) — yang merupakan generalisasi Gauss-Seidel dengan faktor relaksasi ω ∈ (1, 2) — dapat mengurangi jumlah iterasi hingga 50–70%. Untuk sistem besar (jutaan sel), metode multigrid atau preconditioned conjugate gradient jauh lebih efisien daripada Gauss-Seidel standar.
Untuk pendekatan holistik: Studi ini hendaknya tidak berhenti pada analisis hidrodynamics saja. Integrasi dengan analisis kekuatan struktur kemudi (structural analysis) untuk memastikan bahwa gaya yang diprediksi (FL = 237.6 kN pada titik stall) tidak melampaui batas kekuatan material dan sambungan kemudi, adalah langkah lanjutan yang esensial untuk keselamatan kapal.
5.3 Refleksi DAI5
Sebelum menutup laporan ini, ada satu refleksi yang penting untuk disampaikan — sebuah pelajaran yang lebih dalam dari sekadar rumus dan angka.
Dalam proses belajar ini, saya menyadari bahwa metode numerik pada dasarnya adalah sebuah bentuk ijtihad intelektual: kita tidak memiliki solusi sempurna (karena persamaan terlalu kompleks), maka kita mulai dari tebakan terbaik yang kita bisa, lalu kita perbaiki secara iteratif, langkah demi langkah, hingga mendekati kebenaran dalam batas kemampuan kita.
Bukankah ini juga cara manusia seharusnya menjalani hidup? Kita memulai dengan niat (tebakan awal), kita bertindak (iterasi), kita merefleksikan kesalahan (residual), kita perbaiki (update), dan kita terus berulang hingga mencapai standar terbaik yang kita mampu (konvergensi). Dan seperti simulasi yang tidak pernah bisa sepenuhnya merepresentasikan lautan nyata, kita pun menyadari dengan rendah hati bahwa pemahaman manusia tidak pernah bisa sepenuhnya melingkupi kebesaran ciptaan Allah SWT.
“Dan tidaklah kalian diberi ilmu melainkan hanya sedikit.” (QS. Al-Isra’: 85)
Kesadaran akan keterbatasan ini bukan penghalang untuk bersemangat belajar — justru sebaliknya. Ia adalah pengingat untuk selalu tawadhu (rendah hati) di hadapan ilmu, selalu kritis terhadap asumsi-asumsi kita sendiri, dan selalu berorientasi pada manfaat bagi sesama.
اَلْحَمْدُ لِلَّهِ عَلَى نِعْمَةِ الْعَقْلِ وَالْعِلْمِ (Segala puji bagi Allah atas nikmat akal dan ilmu)
DAFTAR PUSTAKA
- Brix, J. (Ed.). (1993). Manoeuvring Technical Manual. Seehafen Verlag, Hamburg. — Referensi utama untuk koefisien manuver kapal dan teori kemudi.
- Carlton, J. (2012). Marine Propellers and Propulsion (3rd ed.). Butterworth-Heinemann. — Mencakup interaksi propulsi-kemudi dan analisis gaya kemudi.
- Anderson, J. D. (2010). Fundamentals of Aerodynamics (5th ed.). McGraw-Hill. — Dasar teori airfoil, koefisien CL dan CD, dan fenomena stall.
- Chapra, S. C., & Canale, R. P. (2015). Numerical Methods for Engineers (7th ed.). McGraw-Hill. — Referensi utama untuk algoritma Gauss-Seidel dan metode numerik.
- Versteeg, H. K., & Malalasekera, W. (2007). An Introduction to Computational Fluid Dynamics: The Finite Volume Method (2nd ed.). Pearson Education. — Referensi komprehensif untuk FVM dalam CFD.
- Fossen, T. I. (2011). Handbook of Marine Craft Hydrodynamics and Motion Control. Wiley. — Model matematis komprehensif untuk dinamika kapal.
- ITTC (International Towing Tank Conference). (2017). Recommended Procedures: Testing and Extrapolation Methods — Manoeuvring, Rudder Force Tests. ITTC Procedure 7.5-02-06-02.
- NACA Technical Report: Abbott, I. H., & Von Doenhoff, A. E. (1959). Theory of Wing Sections. Dover Publications. — Data empiris koefisien untuk profil NACA seri 0015.
وَالسَّلَامُ عَلَيْكُمْ وَرَحْمَةُ اللّٰهِ وَبَرَكَاتُهُ
Laporan ini disusun sebagai dokumentasi studi mandiri. Seluruh data perhitungan bersifat fiktif-pedagogis dan tidak dimaksudkan sebagai acuan desain kapal aktual.