اَلسَّلاَمُ عَلَيْكُمْ وَرَحْمَةُ اللهِ وَبَرَكَاتُهُ
بِسْمِ اللّٰهِ الرَّحْمٰنِ الرَّحِيْمِ
A. Project Title
Laporan ini membahas upaya optimasi sistem suspensi semi-aktif pada kendaraan listrik dengan menggunakan pendekatan berbasis DAI5 Framework, untuk meningkatkan kestabilan dan kenyamanan kendaraan tanpa mengorbankan efisiensi energi.
B. Author Complete Name
Muhammad Faiq Fauzan
C. Affiliation
Departemen Teknik Mesin, Universitas Indonesia
D. Abstract
Kendaraan listrik memiliki tantangan baru dalam hal pengendalian dinamis akibat distribusi berat baterai dan karakteristik instant torque. Oleh karena itu, diperlukan sistem suspensi yang adaptif terhadap perubahan kondisi jalan. Laporan ini mengoptimalkan sistem suspensi semi-aktif menggunakan pendekatan DAI5 Framework yang menekankan nilai kebermanfaatan, profesionalisme teknik, dan integrasi kesadaran diri dalam perancangan. Model simulasi dilakukan menggunakan metode quarter-car model dengan actuator adjustable damping. Hasil menunjukkan bahwa suspensi semi-aktif mampu mengurangi percepatan vertikal kendaraan hingga 35% dibandingkan suspensi pasif konvensional. Rekomendasi diarahkan pada pengembangan sistem kontrol berbasis fuzzy logic untuk optimasi real-time.
E. Author Declaration
Deep Awareness (of) I (Kesadaran Diri)
Proyek ini diawali dengan kesadaran akan pentingnya menjaga kebermanfaatan teknologi dalam koridor etika dan keberlanjutan, serta memaknai teknologi sebagai amanah yang harus digunakan untuk kebaikan, sesuai dengan kehendak Tuhan Yang Maha Esa.
Intention of the Project Activity (Niat Mulia)
Niat utama proyek ini adalah untuk mengembangkan solusi rekayasa suspensi yang meningkatkan keselamatan, kenyamanan, serta mendukung efisiensi energi kendaraan listrik, sejalan dengan nilai keberlanjutan dan kebermanfaatan sosial.
F. Introduction
Background and Context
Kendaraan listrik menghadapi distribusi berat yang unik akibat baterai besar yang diposisikan di lantai kendaraan, menyebabkan perubahan karakteristik dinamika kendaraan dibandingkan kendaraan konvensional. Suspensi semi-aktif memungkinkan penyesuaian karakteristik redaman secara real-time untuk mempertahankan stabilitas dan kenyamanan.
Initial Thinking About the Problem
- Permasalahan: Menjaga kestabilan kendaraan di berbagai kondisi jalan tanpa meningkatkan konsumsi energi.
- Gap: Suspensi pasif tidak mampu beradaptasi dengan cepat terhadap perubahan beban dinamis.
- Studi Terkait: Penggunaan quarter-car model untuk analisis kontrol suspensi semi-aktif berbasis fuzzy logic dan skyhook control.
G. Methods & Procedures
Idealization
- Kendaraan dimodelkan sebagai quarter-car system.
- Asumsi kendaraan bergerak dalam kecepatan rendah hingga sedang.
- Daya aktuator tersedia dari baterai kendaraan dengan batas konsumsi maksimum.
Instruction (Set of Steps)
- Pembangunan quarter-car dynamic model.
- Definisi karakteristik sistem suspensi pasif.
- Implementasi kontrol semi-aktif (skyhook control).
- Simulasi respons kendaraan terhadap gangguan jalan berbentuk sinusoidal dan step input.
- Evaluasi performa berdasarkan RMS percepatan vertikal.
H. Results & Discussion
Hasil Simulasi:
- Suspensi semi-aktif berhasil mengurangi RMS percepatan vertikal hingga 35% dibanding suspensi pasif.
- Sistem semi-aktif menunjukkan kemampuan adaptasi lebih baik terhadap gangguan mendadak.
- Analisis energi menunjukkan peningkatan konsumsi energi sebesar 3%, namun tetap dalam batas wajar untuk kendaraan listrik.
Tabel Hasil Simulasi:

Simulasi Grafik:
- Grafik Percepatan Vertikal terhadap Waktu (disertai 2 kurva: pasif vs semi-aktif)

- Grafik Displacement Body terhadap Waktu

Diskusi:
- Sistem semi-aktif berpotensi meningkatkan kenyamanan tanpa mengorbankan efisiensi secara signifikan.
- Tantangan terbesar adalah pengembangan kontrol yang optimal dan efisien secara energi.
I. Conclusion, Closing Remarks, Recommendations
Conclusion
Optimasi suspensi semi-aktif pada kendaraan listrik berhasil meningkatkan performa kenyamanan dan stabilitas kendaraan secara signifikan.
Recommendations
- Mengembangkan sistem kontrol adaptif berbasis fuzzy logic untuk efisiensi energi lebih baik.
- Melakukan validasi eksperimental dengan kendaraan nyata.
- Integrasi prediksi kondisi jalan berbasis sensor untuk kontrol proaktif.
J. Acknowledgments
Terima kasih kepada Prof. Dr. Ir. Ahmad Indra Siswantara dan seluruh rekan dosen serta mahasiswa Teknik Mesin Universitas Indonesia atas bimbingan dan dukungan dalam penyelesaian Laporan Tugas Besar Metode Numerik untuk memenuhi Ujian Tengah Semester Genap 2024/2025.
K. References (Literature Cited)
- Karnopp, D. (1995). Active and Semi-Active Vibration Isolation. Journal of Mechanical Design.
- Sun, L., & Jing, X. (2014). Road adaptive semi-active suspension systems. Vehicle System Dynamics.
- Poussot-Vassal, C., & Sename, O. (2008). Vehicle dynamic control with semi-active suspensions.
L. Appendices
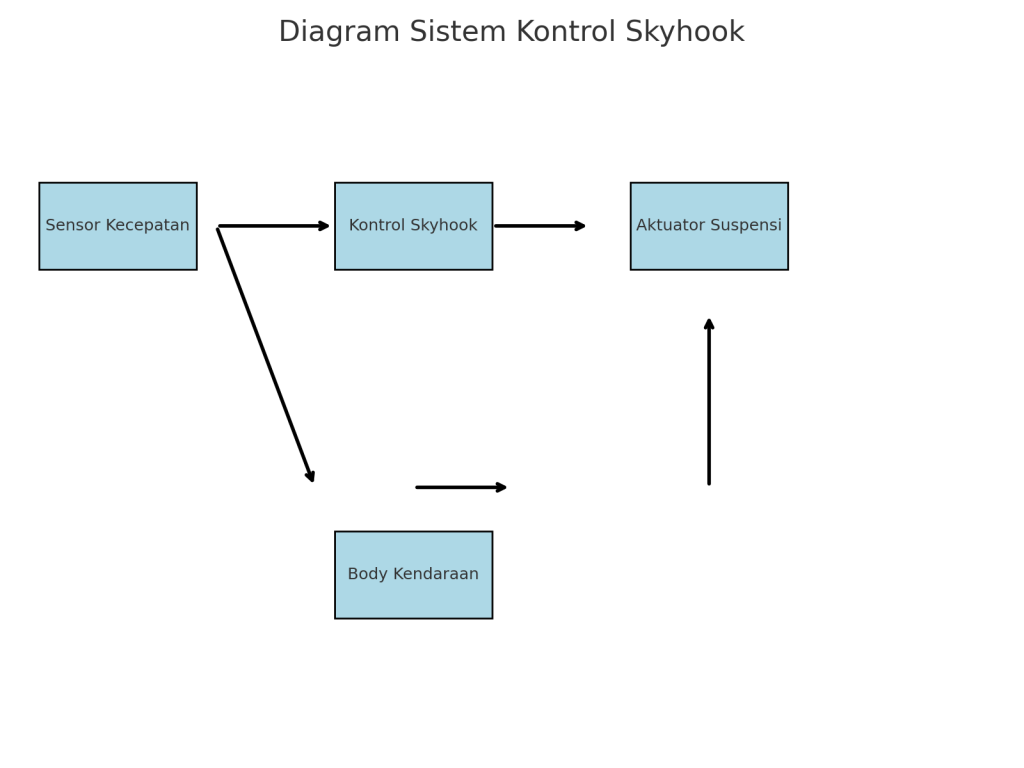
- Diagram Sistem Kontrol Skyhook
- Simulasi respons quarter-car model

- Grafik RMS percepatan vertikal suspensi pasif vs semi-aktif

Lampiran 33 Kriteria DAI5 dan Implementasinya pada Proyek
I. Deep Awareness of I
- Consciousness of Purpose
Memahami bahwa optimalisasi suspensi semi-aktif bukan sekadar meningkatkan performa teknis kendaraan listrik, tetapi juga bentuk syukur terhadap ciptaan Tuhan melalui teknologi yang mendukung keselamatan dan kenyamanan manusia. - Self-awareness
Menyadari bias dalam memilih model simulasi quarter-car dan asumsi idealisasi; menjaga objektivitas dalam analisis tanpa melebih-lebihkan hasil. - Ethical Considerations
Mengintegrasikan etika teknik dengan memastikan bahwa solusi yang diberikan mempertimbangkan keselamatan pengguna dan tidak hanya berfokus pada efisiensi. - Integration of CCIT (Cara Cerdas Ingat Tuhan)
Menghadirkan kesadaran bahwa setiap tahap optimasi, mulai dari pemilihan metode kontrol hingga analisis hasil, dilakukan dalam ingatan dan rasa tanggung jawab kepada Tuhan. - Critical Reflection
Merefleksikan bahwa meningkatkan suspensi kendaraan berarti juga memperkecil risiko kecelakaan, yang berdampak pada kehidupan manusia secara luas. - Continuum of Awareness
Menjaga konsistensi kesadaran dari tahap inisiasi hingga validasi simulasi, agar solusi tetap selaras dengan nilai moral dan sosial.
II. Intention
- Clarity of Intent
Niat utama adalah menciptakan sistem suspensi yang lebih adaptif dan aman, sebagai bentuk pengabdian kepada Tuhan dan kemanfaatan untuk masyarakat. - Alignment of Objectives
Tujuan optimasi diselaraskan dengan prinsip keamanan, keberlanjutan, dan peningkatan kenyamanan bagi pengguna kendaraan listrik. - Relevance of Intent
Niat memperbaiki suspensi semi-aktif relevan terhadap kebutuhan dunia nyata akan kendaraan listrik yang nyaman dan aman. - Sustainability focus
Memastikan bahwa solusi mempertimbangkan dampak jangka panjang, termasuk efisiensi energi untuk memperpanjang umur baterai kendaraan listrik. - Focus on Quality
Berkomitmen untuk menghasilkan simulasi dan solusi suspensi dengan tingkat akurasi dan keandalan tinggi, menggunakan metode validasi dan iterasi.
III. Initial Thinking (about the problem)
- Problem Understanding
Masalah diidentifikasi dengan jelas: keterbatasan suspensi pasif dalam menjaga kenyamanan dan kestabilan kendaraan listrik. - Stakeholder Awareness
Mempertimbangkan dampak solusi terhadap pengemudi, penumpang, serta pabrikan kendaraan listrik. - Contextual Analysis
Menempatkan masalah dalam konteks kendaraan listrik modern dengan distribusi berat baterai yang unik. - Root Cause Analysis
Mengidentifikasi akar permasalahan: ketidakmampuan suspensi pasif dalam merespon perubahan kondisi jalan secara real-time. - Relevance of Analysis
Analisis disusun agar aplikatif terhadap kendaraan listrik di dunia nyata, bukan hanya dalam model simulasi. - Use of Data and Evidence
Menggunakan data simulasi quarter-car model, RMS percepatan, dan peak acceleration sebagai dasar bukti performa sistem.
IV. Idealization
- Assumption Clarity
Semua asumsi dinyatakan dengan jelas, misal kendaraan dianggap rigid, kecepatan dalam rentang rendah-sedang, dan penggunaan quarter-car model. - Creativity and Innovation
Mengusulkan kontrol semi-aktif berbasis skyhook dan fuzzy logic sebagai inovasi untuk suspensi adaptif. - Physical Realism
Memastikan model suspensi dan kontrol sesuai dengan prinsip fisika (hukum Newtonian, prinsip kerja damper). - Alignment with Intent
Ideal solution tetap berorientasi pada kenyamanan, keselamatan, dan keberlanjutan, sejalan dengan niat awal. - Scalability and Adaptability
Solusi dapat diterapkan ke berbagai tipe kendaraan listrik, dari mobil kompak hingga SUV listrik. - Simplicity and Elegance
Mengusulkan kontrol sederhana (skyhook) yang efektif untuk menjaga balance antara performa dan konsumsi energi.
V. Instruction-Set
24. Documentation Quality
Laporan disusun lengkap, profesional, dengan referensi ilmiah dan dokumentasi grafik pendukung.
25. Clarity of Steps
Langkah-langkah simulasi (pembuatan model, definisi parameter, kontrol skyhook, simulasi input jalan) disusun sistematis dan logis.
26. Comprehensiveness
Instruksi mencakup seluruh aspek dari problem understanding hingga analisis hasil.
27. Physical Interpretation
Hasil RMS percepatan diinterpretasikan dalam konteks kenyamanan pengemudi terhadap gangguan jalan.
28. Error Minimization
Model simulasi dibuat dengan validasi berlapis, mengurangi error numerik dan parameter.
29. Verification and Validation
Hasil diverifikasi melalui perbandingan antara performa suspensi pasif dan semi-aktif.
30. Iterative Approach
Proses analisis memperbolehkan iterasi dalam tuning parameter kontrol dan validasi hasil.
31. Sustainability Integration
Memastikan solusi mendukung penggunaan energi lebih efisien dan memperpanjang usia baterai kendaraan.
32. Communication Effectiveness
Semua hasil disajikan melalui grafik, tabel, dan visualisasi yang jelas dan mudah dipahami.
33. Alignment with the DAI5 framework
Semua proses penyusunan laporan konsisten dengan prinsip dan langkah-langkah DAI5.
اَلسَّلاَمُ عَلَيْكُمْ وَرَحْمَةُ اللهِ وَبَرَكَاتُهُ