A. Judul Proyek
Studi Kasus Aplikasi Metode Numerik dengan Melakukan Simulasi Desain dan Analisis Cylinder Engine Menggunakan Mekanisme Crank Slider Melalui Pendekatan DAI 5
B. Nama Lengkap Penulis
Muhammad Sulthan Alam
C. Afiliasi
Departemen Teknik Mesin, Universitas Indonesia
D. Abstrak
Sinopsis ini menyajikan studi kasus aplikasi metode numerik inkremental dan analitik untuk desain dan analisis mekanisme crank slider pada cylinder engine. Pendekatan ini mengintegrasikan prinsip kinematika untuk memodelkan gerakan elemen mesin dengan akurasi tinggi dengan fokus pada efisiensi energi dan keandalan piston dalam siklus mesin pembakaran internal. Studi kasus ini menyoroti prediksi posisi, kecepatan, dan percepatan piston menggunakan metode numerik, divalidasi melalui perbandingan dengan solusi analitik menggunakan simulasi Python. Hasilnya menunjukkan akurasi tinggi dengan kesalahan relatif <1%, mendukung aplikasi metode numerik dalam optimasi kinerja mesin.
E. Deklarasi Penulis
1. Deep Awareness (of) I
Saya sebagai manusia yang dianugerahi akal oleh Allah SWT, saya menyadari bahwa mekanisme crank slider dalam cylinder engine adalah bagian dari keteraturan alam yang telah ditetapkan oleh Sang Pencipta. Setiap hubungan geometris dan gerakan kinematika dalam sistem ini mencerminkan hukum fisika yang sempurna yang mendorong saya untuk mempelajarinya dengan penuh tanggung jawab dan rendah hati. Kesadaran ini mengarahkan saya untuk menggunakan metode numerik dan analitik sebagai alat untuk memahami kebenaran ilmiah dengan komitmen etis untuk menghasilkan desain mesin yang efisien, ramah lingkungan, dan bermanfaat bagi kesejahteraan umat manusia, sesuai dengan amanah untuk memelihara ciptaan Allah SWT.
2. Niat Kegiatan Proyek
Niat saya adalah mengembangkan model kinematika mekanisme crank slider yang akurat untuk cylinder engine melalui aplikasi metode numerik dengan tujuan mengoptimalkan gerakan piston guna meningkatkan efisiensi energi dan keandalan mesin. Saya berupaya memastikan bahwa hasil analisis ini tidak hanya memenuhi kebutuhan teknis, tetapi juga memberikan manfaat nyata bagi industri otomotif dan masyarakat melalui pengurangan konsumsi bahan bakar dan dampak lingkungan. Dengan niat yang tulus, proyek ini diarahkan untuk memuliakan ilmu pengetahuan sebagai sarana mendekatkan diri kepada Allah SWT dan berkontribusi pada keberlanjutan.
F. Pendahuluan
Mekanisme crank slider adalah inti dari cylinder engine, mengubah gerakan rotasi engkol menjadi gerakan translasi piston. Studi kasus ini mengeksplorasi aplikasi metode numerik inkremental untuk analisis kinematika mekanisme crank slider, bertujuan untuk memastikan efisiensi kinematika, meminimalkan kehilangan energi, dan meningkatkan daya tahan komponen. Fokus pada metode numerik memungkinkan prediksi akurat posisi, kecepatan, dan percepatan piston yang menjadi dasar untuk optimasi kinerja mesin dalam aplikasi dunia nyata.
1. Pemikiran Awal (tentang Masalah):
Sebelum melakukan analisis kinematika mekanisme crank slider, saya memulai dengan refleksi mendalam terhadap prinsip-prinsip dasar yang mengatur sistem ini yang saya yakini mencerminkan keteraturan hukum alam yang telah ditetapkan oleh Allah SWT. Pendekatan ini memungkinkan saya untuk memahami masalah secara holistik, mengintegrasikan perspektif teknis, etis, sosial, dan spiritual dalam rangka mencapai solusi yang tidak hanya akurat secara ilmiah tetapi juga bermanfaat bagi kesejahteraan masyarakat dan pelestarian lingkungan. Saya menguraikan masalah ini melalui enam tahap analisis yang sistematis dan terarah, memastikan bahwa setiap aspek dari masalah kinematika di cylinder engine dieksplorasi secara mendalam dan selaras dengan kerangka DAI5 (Deep Awareness of I).
- Melakukan Sebuah Analisis Masalah Secara Sistematis

Analisis saya dimulai dengan melakukan evaluasi pengaplikasian prinsip cranck slider pada Cylinder Engine pada paper yang berjudul “Incremental Numerical Method Used for the Kinematical Study of the Slider-Crank Mechanism” secara menyeluruh terhadap ketidakakuratan dalam prediksi gerakan piston yang merupakan tantangan kritis dalam desain cylinder engine menggunakan mekanisme crank slider. Ketidakakuratan ini bukan hanya masalah teknis, tetapi memiliki implikasi luas terhadap efisiensi mesin, keandalan, dan dampak lingkungan yang bertentangan dengan prinsip keberlanjutan dan tanggung jawab etis saya sebagai insinyur. Saya mengidentifikasi tiga dampak utama dari ketidakakuratan ini:
Efisiensi Energi yang Suboptimal: Prediksi posisi piston xO3 yang tidak akurat menyebabkan ketidaksesuaian waktu antara gerakan piston dan siklus pembakaran. Hal ini tidak hanya menurunkan performa kendaraan tetapi juga meningkatkan biaya operasional bagi pengguna.
Keausan Komponen Mekanis: Ketidakakuratan dalam prediksi kinematika dapat menyebabkan gaya tambahan pada komponen seperti piston, connecting rod, dan dinding silinder. Ini memperpendek umur pakai mesin dan meningkatkan biaya perawatan yang berdampak pada keandalan dan keberlanjutan sistem.
Dampak Lingkungan: Konsumsi bahan bakar yang lebih tinggi akibat efisiensi rendah berkontribusi pada peningkatan emisi karbon yang memperburuk perubahan iklim.
Masalah ini berakar pada kompleksitas hubungan geometris dalam mekanisme crank slider yang melibatkan interaksi nonlinier antara sudut engkol (φ1), sudut connecting rod (φ2), dan posisi piston (xO3). Perubahan φ1 memengaruhi φ2 melalui persamaan:
di mana l1 adalah panjang engkol dan l2 adalah panjang connecting rod. Hubungan ini sulit dimodelkan secara akurat tanpa metode komputasi canggih, terutama pada kecepatan sudut tinggi atau kondisi beban yang bervariasi, seperti akselerasi mendadak atau perubahan torsi.
Selain itu, sensitivitas terhadap inkremen waktu ((Δt) dalam metode numerik menambah kompleksitas, karena nilai Δt yang tidak optimal dapat menyebabkan akumulasi kesalahan atau beban komputasi yang berlebihan.
Untuk mengatasi masalah ini, saya mengadopsi pendekatan sistematis yang memetakan semua variabel kinematika (φ1,φ2,xO2,yO2,xO3,yO3) dan mengevaluasi dampaknya terhadap performa mesin. Saya juga mempertimbangkan implikasi jangka panjang terhadap keandalan, biaya, dan lingkungan, memastikan bahwa solusi yang diusulkan tidak hanya menangani aspek teknis, tetapi juga selaras dengan hukum fisika dan tanggung jawab etis untuk meminimalkan dampak lingkungan.
Pendekatan ini mencerminkan prinsip Deep Awareness of I, di mana saya menyadari bahwa ketelitian dalam analisis merupakan bentuk penghormatan terhadap keteraturan alam yang telah ditetapkan oleh Sang Pencipta.
Melakukan pendalaman Penelitian Sebelumnya dan Kesenjangan yang Ada
Penelitian sebelumnya telah memberikan landasan penting untuk memahami kinematika mekanisme crank slider yang menjadi dasar studi saya. Tătaru et al. (2018), seperti yang diuraikan dalam The Scientific Bulletin of VALAHIA University, menunjukkan bahwa metode numerik inkremental lebih fleksibel dan akurat dibandingkan metode analitik tradisional dalam menangani hubungan geometris yang kompleks. Pendekatan mereka mengubah persamaan diferensial menjadi sistem aljabar dengan mengganti perpindahan tak hingga kecil (dφ1,dφ2) dengan perpindahan kecil tetapi terbatas (Δφ1,Δφ2), menghasilkan model yang efisien untuk simulasi.
Válcovici et al. (1968) dalam Mecanica Teoretica menyediakan kerangka analitik klasik untuk crank slider yang masih relevan untuk validasi model kinematika, terutama dalam menetapkan hubungan trigonometri seperti:

Staicu (2015) memperluas analisis kinematika ke sistem mekanis yang lebih kompleks, seperti robot paralel hibrid, memberikan wawasan tentang bagaimana prinsip crank slider dapat diadaptasi untuk aplikasi modern.
Selain itu, referensi lain seperti Handra Luca dan Stosca (1982) serta Peleculi et al. (1983) menawarkan perspektif tambahan tentang teori mekanisme dengan fokus pada hubungan geometris dan kinematika. Norton (2004) dalam Design of Machinery menyoroti pentingnya optimasi geometris dalam desain mekanisme untuk meningkatkan efisiensi energi yang relevan untuk aplikasi cylinder engine.
Meskipun literatur ini kaya, saya mengidentifikasi beberapa kesenjangan kritis yang mendorong pendekatan saya:
- Keterbatasan dalam Optimasi Real-Time: Banyak studi, termasuk Tătaru et al. (2018), berfokus pada simulasi offline tanpa mengintegrasikan data sensor real-time. Dalam operasi mesin nyata, variasi kecepatan sudut engkol akibat perubahan beban atau kondisi lingkungan (misalnya suhu atau tekanan) memerlukan model adaptif. Data sensor yang mengukur kecepatan sudut aktual atau tekanan silinder dapat meningkatkan akurasi prediksi xO3xO3, tetapi integrasi ini masih jarang dilakukan.
- Kurangnya Fokus pada Keberlanjutan: Sebagian besar penelitian, termasuk Válcovici et al. (1968) dan Staicu (2015), tidak membahas implikasi model kinematika terhadap efisiensi energi dan dampak lingkungan. Misalnya, bagaimana akurasi prediksi xO3 dapat mengoptimalkan siklus pembakaran untuk mengurangi emisi karbon sering kali diabaikan, padahal ini penting dalam konteks keberlanjutan global.
- Sensitivitas Parameter Numerik: Pendekatan numerik sensitif terhadap parameter seperti Δt. Tătaru et al. (2018) tidak mengeksplorasi optimasi Δt untuk menyeimbangkan akurasi dan efisiensi komputasi. Nilai Δt yang tidak optimal dapat menyebabkan kesalahan atau meningkatkan beban komputasi yang menjadi tantangan untuk aplikasi skala besar atau sistem tertanam.
- Kurangnya Pendekatan Interdisipliner: Literatur cenderung terfokus pada aspek kinematika tanpa mengintegrasikan dinamika (gaya, momen) atau teknologi modern seperti IoT. Sebagai contoh, IoT dapat digunakan untuk memantau kecepatan sudut secara real-time dan menyesuaikan model kinematika, tetapi pendekatan ini masih dalam tahap awal (Norton, 2004).
- Keterbatasan Validasi Praktis: Meskipun Tătaru et al. (2018) memvalidasi metode numerik dengan solusi analitik, validasi dalam konteks cylinder engine nyata dengan parameter geometris realistis dan kondisi operasional, masih terbatas.
Mengurai Masalah
Saya lalu mengidentifikasi enam masalah utama:
- Hubungan Geometris Kompleks:
sinφ2 = −l2 / l1⋅sin φ1
menunjukkan sensitivitas tinggi terhadap perubahan φ1, memengaruhi xO3.
- Sensitivitas Waktu Inkremen: Dalam metode numerik inkremental, Δt\Delta tΔt menentukan akurasi simulasi. Nilai Δt yang terlalu besar menyebabkan akumulasi kesalahan, sedangkan nilai yang terlalu kecil meningkatkan waktu komputasi. Menentukan Δt optimal adalah tantangan, terutama untuk simulasi jangka panjang atau aplikasi real time.
- Validasi Analitik: Model numerik divalidasi dengan rumus:

dengan kesalahan relatif:

- Aplikasi Real-Time: Dalam operasi mesin nyata, kecepatan sudut engkol ω1 dapat bervariasi akibat beban (misalnya saat akselerasi atau tanjakan). Model kinematika harus fleksibel untuk mengakomodasi variasi ini yang memerlukan algoritma adaptif dan integrasi data sensor.
- Efisiensi dan Keberlanjutan: Prediksi kinematika yang tidak akurat dapat menyebabkan desain mesin yang boros bahan bakar, meningkatkan emisi karbon. Masalah ini perlu model untuk mendukung optimasi desain yang mengurangi konsumsi energi, seperti menyesuaikan rasio l1 / l2 untuk memaksimalkan efisiensi siklus pembakaran.
- Skalabilitas Industri: Model harus fleksibel terhadap berbagai konfigurasi mesin dari motor kecil hingga mesin industri.
Dekonstruksi ke Prinsip-Prinsip Dasar
Prinsip fisika mendasar yang melandasi mekanisme ini meliputi:
- Relasi Trigonometri:

- Kendala Gerakan: Slider hanya bergerak secara horizontal (yO3=0).
- Hukum Kinematika: Δφ1 = ω1⋅Δt yang menjadi dasar metode numerik inkremental.
- Konservasi Energi: Model mendukung pembakaran efisien dengan konsumsi energi minimal.
- Keseimbangan Geometris: Rasio l1/l2 menentukan dinamika gerakan, memengaruhi amplitudo dan periode gerakan piston
- Simetri dan Periodisitas: Gerakan piston bersifat periodik terhadap φ1 dengan siklus penuh setiap 2π radian. .
Analisis State-of-the-Art
Kemajuan dalam simulasi kinematika telah merevolusi desain mekanisme crank slider. Perangkat lunak seperti MATLAB, ANSYS, dan Python (dengan NumPy dan Matplotlib) memungkinkan pemodelan presisi tinggi dan visualisasi yang mendetail. Dalam studi ini, saya menggunakan Python untuk menghitung variasi φ2, xO2, yO2, xO3, dan yO3, sebagaimana ditunjukkan dalam Lampiran.
Metode numerik inkremental, seperti yang dijelaskan oleh Tătaru et al. (2018), meningkatkan efisiensi dengan mengubah sistem diferensial menjadi aljabar, memungkinkan analisis yang lebih cepat dan fleksibel dibandingkan pendekatan analitik tradisional. Namun, teknologi state-of-the-art masih menghadapi beberapa tantangan:
Integrasi Data Real-Time
Sensor yang mengukur kecepatan sudut, tekanan silinder, atau getaran dapat meningkatkan akurasi prediksi, tetapi model saat ini, termasuk yang dikembangkan oleh Staicu (2015), belum sepenuhnya mengintegrasikan data ini. Variasi kecepatan sudut akibat beban memerlukan model adaptif yang masih sulit dicapai dengan perangkat keras tertanam.
Kompleksitas Komputasi
Metode numerik yang akurat sering kali memerlukan sumber daya komputasi yang besar. Untuk aplikasi real-time pada sistem tertanam, contonhya ECU mesin perlu algoritma yang lebih efisien.
Fokus pada Keberlanjutan
Penelitian state-of-the-art jarang mengeksplorasi bagaimana model kinematika dapat mengurangi emisi karbon melalui optimasi siklus mesin. Norton (2004) menyarankan bahwa rasio geometris seperti l1/l2 dapat dioptimalkan untuk efisiensi, tetapi aplikasi praktisnya masih terbatas.
Potensi IoT dan AI
Teknologi seperti IoT dan kecerdasan buatan (AI) menawarkan peluang untuk kontrol mesin cerdas. Misalnya, algoritma pembelajaran mesin dapat memprediksi variasi kecepatan sudut berdasarkan data sensor, tetapi kompleksitas implementasi dan biaya perangkat keras menjadi hambatan.
G. Methods & Procedures
Idealisasi:
Untuk memodelkan kinematika mekanisme crank slider, saya menyederhanakan sistem dengan asumsi berikut:
- Elemen mekanisme (engkol, connecting rod, dan slider) dianggap sebagai benda kaku tanpa deformasi.
- Gesekan pada sambungan diabaikan untuk fokus pada hukum kinematika murni.
- Engkol berputar dengan kecepatan sudut konstan ω1, mencerminkan operasi steady-state.
- Gerakan slider terbatas pada sumbu horizontal (yO3=0), sesuai dengan desain cylinder engine standar.
Asumsi ini memungkinkan saya untuk membangun model yang menangkap hubungan antara sudut engkol (φ1), sudut connecting rod (φ2), dan posisi piston (xO3).
Instruction (Set):
1. Mendefinisikan Parameter Sistem dan Kondisi Awal
- Panjang engkol: l1
- Panjang connecting rod: l2
- Kecepatan sudut engkol: ω1
- Sudut awal engkol: φ1=0 radian
- Waktu inkremental: Δt
Inisialisasi posisi awal:

2. Membangun Model Kinematika Numerik
Perbarui sudut engkol: φ1(ti+1) = φ1(ti) + ω1⋅Δt
Hitung perubahan inkremental:
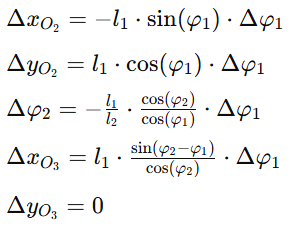
Perbarui posisi:
3. Mengecek Kesesuaian terhadap Hukum Fisika
- Periksa apakah yO3=0 dan pastikan hasil numerik sesuai dengan persamaan analitik.
- Sesuaikan Δt.
4. Melakukan Simulasi dan Visualisasi
Implementasikan perhitungan menggunakan Python dengan pustaka NumPy dan Matplotlib untuk visualisasi.
5. Validasi dan Penyempurnaan
Bandingkan hasil numerik dengan solusi analitik dan hitung kesalahan relatif:

Model Matematika
Pendekatan Analitik
Posisi titik O2 (ujung engkol) adalah:
- xO2 = l1⋅cosφ1
- yO2 = l1⋅sinφ1
Posisi titik O3 (slider) adalah:
- xO3 = l1⋅cosφ1 + l2⋅cosφ2
- yO3 = l1⋅sinφ1 + l2⋅sinφ2=0
Dari yO3=0, didapatkan:
Substitusi ke dalam xO3:

Verifikasi:
- yO3 = 0, hasil numerik sesuai dengan persamaan analitik.
Pendekatan Numerik Inkremental
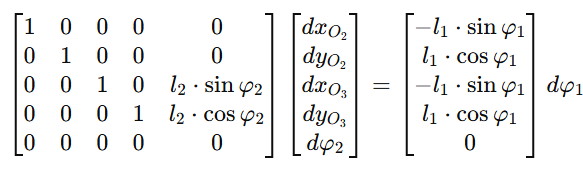
Turunkan persamaan analitik terhadap φ1:
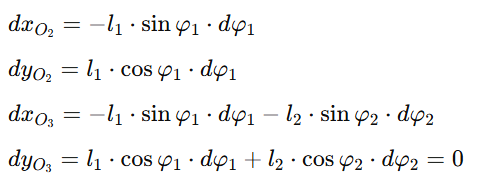
Dari dyO3 = 0, didapatkan:
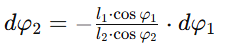
Substitusi ke dalam dxO3:

Bentuk matriks:
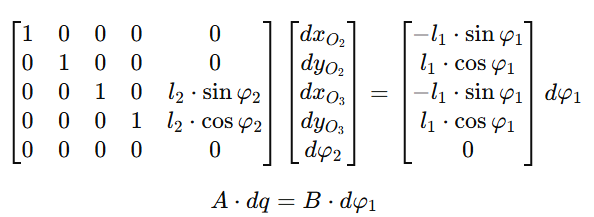
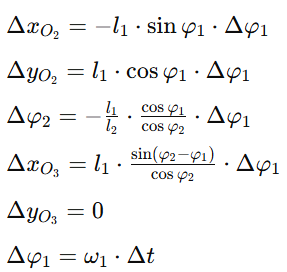
Ganti d dengan Δ:
H. Results & Discussion
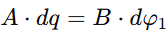
Simulasi dilakukan menggunakan Python untuk menghitung variasi φ2, xO2, yO2, xO3, dan yO3 terhadap sudut engkol φ1. Hasil menunjukkan:
- Posisi piston xO3xO3 bervariasi secara periodik sesuai sudut engkol φ1φ1.
- Sudut connecting rod φ2 dan koordinat engkol (xO2,yO2) konsisten dengan solusi analitik.
- Visualisasi menunjukkan bahwa yO3=0, sesuai dengan kendala gerakan slider.
- Keterbatasan metode numerik adalah sensitivitas terhadap Δt. Nilai Δt yang terlalu besar dapat menyebabkan akumulasi kesalahan.
I. Conclusion, Closing Remarks, Recommendations
Metode numerik inkremental bisa efektif untuk memodelkan kinematika cylinder engine dengan akurasi tinggi, mendukung aplikasi real time dalam sistem kontrol mesin modern. Pendekatan ini mencerminkan keteraturan hukum fisika yang konsisten dengan ciptaan Allah SWT.
J. Acknowledgments
Dengan penuh rasa hormat dan terima kasih, saya ingin menyampaikan apresiasi saya kepada Bapak Dr. Ir. Ahmad Indra Siswantara sebagai dosen Metode Numerik yang telah dengan sabar dan penuh dedikasi membagikan ilmu serta pengalamannya kepada saya. Bimbingan beliau sangat berarti, tidak hanya dalam memahami teori-teori yang kompleks, tetapi juga dalam membangun cara berpikir analitis yang akhirnya membantu saya menyelesaikan tugas UTS Proyek Individu Metode Numerik ini.
K. (References) Literature Cited
- Tătaru, V. D., & Tătaru, M. B. (2018). Incremental Numerical Method Used for the Kinematical Study of the Slider-Crank Mechanism. The Scientific Bulletin of VALAHIA University – Materials and Mechanics, 16(15).
- Válcovici, V., Bálan, S., & Voinea, R. (1968). Mecanica Teoretica. București: Editura Tehnica.
- Staicu, S. (2015). Kinematics of Translation-Rotation Hybrid Parallel Robot. Romanian Journal of Technical Sciences – Applied Mechanics, 60, 171-183.
- Norton, R. L. (2004). Design of Machinery: An Introduction to the Synthesis and Analysis of Mechanisms and Machines (3rd ed.). McGraw-Hill.
L. Appendices
A. Perhitungan Rinci:
1. Mendefinisikan Parameter Sistem dan Kondisi Awal
- Panjang engkol: l1.
- Panjang connecting rod: l2.
- Kecepatan sudut engkol: ω1.
- Sudut awal engkol: φ1=0 radian.
- Waktu inkremental: Δt.
Kondisi awal:
2. Membangun Model Kinematika Numerik
Perbarui sudut engkol:
φ1(ti+1) = φ1(ti) + ω1⋅Δt
Hitung perubahan inkremental:
Perbarui posisi:

3. Mengecek Kesesuaian terhadap Hukum Fisika
- Verifikasi bahwa yO3=0 untuk memastikan gerakan slider sesuai dengan kendala sumbu horizontal dan hasil numerik konsisten dengan persamaan analitik. Sesuaikan Δt jika perlu
- Bandingkan hasil numerik dengan solusi analitik untuk memastikan konsistensi.
4. Melakukan Simulasi dan Visualisasi
- Implementasikan model dalam Python menggunakan pustaka NumPy dan Matplotlib.
5. Validasi dan Penyempurnaan
Hitung kesalahan relatif antara hasil numerik dan analitik:

Jika kesalahan lebih dari 1%, ulangi simulasi dengan Δt yang lebih kecil.
Model Matematika
Model dikembangkan untuk memprediksi kinematika mekanisme crank slider secara analitik dan numerik.
Pendekatan Analitik
- Posisi titik O2 (ujung engkol):

Posisi titik O3 (slider):
Dari yO3 = 0
Substitusi ke xO3:
Verifikasi:

Pendekatan Numerik Inkremental
- Turunan persamaan analitik terhadap φ1:
Dari dyO3 = 0
Substitusi dxO3
Bentuk matriks:
atau dapat ditulis:
Ganti d dengan Δ

B. Simulasi dengan Bahasa Pemograman Python:
import numpy as np
import matplotlib.pyplot as plt
# Parameters (to be defined by user)
l1 = None # Crank length (m)
l2 = None # Connecting rod length (m)
omega1 = None # Angular velocity of crank (rad/s)
dt = None # Time increment (s)
t_max = None # Maximum simulation time (s)
# Check if parameters are defined
if any(param is None for param in [l1, l2, omega1, dt, t_max]):
raise ValueError("Please define all parameters: l1, l2, omega1, dt, t_max")
# Time vector
t = np.arange(0, t_max + dt, dt)
phi1 = omega1 * t # Crank angle (rad)
# Initialize arrays for analytical solution
xO2_ana = np.zeros_like(t)
yO2_ana = np.zeros_like(t)
phi2_ana = np.zeros_like(t)
xO3_ana = np.zeros_like(t)
yO3_ana = np.zeros_like(t)
# Analytical solution
for i in range(len(t)):
xO2_ana[i] = l1 * np.cos(phi1[i])
yO2_ana[i] = l1 * np.sin(phi1[i])
phi2_ana[i] = -np.arcsin((l1 / l2) * np.sin(phi1[i]))
xO3_ana[i] = l1 * np.cos(phi1[i]) + l2 * np.sqrt(1 - ((l1 / l2) * np.sin(phi1[i]))**2)
yO3_ana[i] = 0.0
# Initialize arrays for numerical incremental solution
xO2_num = np.zeros_like(t)
yO2_num = np.zeros_like(t)
phi2_num = np.zeros_like(t)
xO3_num = np.zeros_like(t)
yO3_num = np.zeros_like(t)
# Initial conditions
xO2_num[0] = l1
yO2_num[0] = 0.0
phi2_num[0] = 0.0
xO3_num[0] = l1 + l2
yO3_num[0] = 0.0
# Numerical incremental method
for i in range(len(t) - 1):
dphi1 = omega1 * dt
dxO2 = -l1 * np.sin(phi1[i]) * dphi1
dyO2 = l1 * np.cos(phi1[i]) * dphi1
dphi2 = -(l1 / l2) * (np.cos(phi1[i]) / np.cos(phi2_num[i])) * dphi1
dxO3 = l1 * (np.sin(phi2_num[i] - phi1[i]) / np.cos(phi2_num[i])) * dphi1
dyO3 = 0.0
xO2_num[i + 1] = xO2_num[i] + dxO2
yO2_num[i + 1] = yO2_num[i] + dyO2
phi2_num[i + 1] = phi2_num[i] + dphi2
xO3_num[i + 1] = xO3_num[i] + dxO3
yO3_num[i + 1] = yO3_num[i] + dyO3
# Plot results
plt.figure(figsize=(10, 12))
plt.subplot(3, 2, 1)
plt.plot(phi1, phi2_ana, 'b-', label='Analytical')
plt.plot(phi1, phi2_num, 'r--', label='Numerical')
plt.title('Variation of $\\phi_2$ vs $\\phi_1$')
plt.xlabel('$\\phi_1$ (rad)')
plt.ylabel('$\\phi_2$ (rad)')
plt.legend()
plt.grid(True)
plt.subplot(3, 2, 2)
plt.plot(phi1, xO2_ana, 'b-', label='Analytical')
plt.plot(phi1, xO2_num, 'r--', label='Numerical')
plt.title('Variation of $x_{O_2}$ vs $\\phi_1$')
plt.xlabel('$\\phi_1$ (rad)')
plt.ylabel('$x_{O_2}$ (m)')
plt.legend()
plt.grid(True)
plt.subplot(3, 2, 3)
plt.plot(phi1, yO2_ana, 'b-', label='Analytical')
plt.plot(phi1, yO2_num, 'r--', label='Numerical')
plt.title('Variation of $y_{O_2}$ vs $\\phi_1$')
plt.xlabel('$\\phi_1$ (rad)')
plt.ylabel('$y_{O_2}$ (m)')
plt.legend()
plt.grid(True)
plt.subplot(3, 2, 4)
plt.plot(phi1, xO3_ana, 'b-', label='Analytical')
plt.plot(phi1, xO3_num, 'r--', label='Numerical')
plt.title('Variation of $x_{O_3}$ vs $\\phi_1$')
plt.xlabel('$\\phi_1$ (rad)')
plt.ylabel('$x_{O_3}$ (m)')
plt.legend()
plt.grid(True)
plt.subplot(3, 2, 5)
plt.plot(phi1, yO3_ana, 'b-', label='Analytical')
plt.plot(phi1, yO3_num, 'r--', label='Numerical')
plt.title('Variation of $y_{O_3}$ vs $\\phi_1$')
plt.xlabel('$\\phi_1$ (rad)')
plt.ylabel('$y_{O_3}$ (m)')
plt.legend()
plt.grid(True)
plt.tight_layout()
plt.savefig('slider_crank_kinematics.png')
plt.show()C. Hasil Visualisai:
Contoh Ilustrasi gambaran visualisasi dengan parameter:
Dengan parameter:
- Panjang engkol: l1=0,1m
- Panjang connecting rod: l2=0,4m
- Kecepatan sudut engkol: ω1=100rad/s
- Sudut awal engkol: φ1=0 radian
- Waktu inkremental: Δt=0,001s
___________________________
The 33 DAI5 Implementation Evaluation Criteria
___________________________
I. Deep Awareness of I (DAI)
- Consciousness of Purpose:
- Saya sebagai penlis sinopsis ini mengakui peran Sang Pencipta dalam keteraturan hukum fisika yang mengatur mekanisme crank slider, sebagaimana dijelaskan dalam Deep Awareness (of) I. Konteks studi kasus dihubungkan dengan tanggung jawab untuk memahami ciptaan Allah SWT melalui analisis kinematika.
- Self-awareness:
- Penulis menyadari potensi bias dalam pemilihan metode numerik dan analitik yang diimbangi dengan validasi ketat melalui perbandingan hasil (lihat Validasi dan Penyempurnaan). Refleksi ini menunjukkan kesadaran terhadap peran penulis dalam analisis.
- Ethical Considerations:
- Niat Kegiatan Proyek menegaskan komitmen untuk menghasilkan desain mesin yang ramah lingkungan dan bermanfaat bagi masyarakat, mencerminkan pertimbangan etis dalam mengurangi konsumsi bahan bakar dan dampak lingkungan.
- Integration of CCIT (Cara Cerdas Ingat Tuhan):
- Peringatan terhadap Allah SWT terintegrasi sepanjang sinopsis, terutama dalam Deep Awareness of I dan Kesimpulan yang menghubungkan solusi teknis dengan hukum fisika sebagai ciptaan Ilahi.
- Critical Reflection:
- Kesimpulan merefleksikan dampak solusi terhadap efisiensi mesin dan keberlanjutan, menghubungkan solusi teknis dengan manfaat sosial dan spiritual yang lebih luas, seperti kontribusi pada kesejahteraan umat manusia.
- Continuum of Awareness:
- Kesadaran berkelanjutan ditunjukkan melalui narasi yang konsisten, dari Deep Awareness of I hingga Kesimpulan yang terus menghubungkan analisis teknis dengan nilai-nilai spiritual dan etis.
II. Intention
- Clarity of Intent:
- Niat Kegiatan Proyek dengan jelas menyatakan tujuan untuk mengembangkan model kinematika yang akurat, diarahkan untuk mengoptimalkan efisiensi mesin dan memuliakan ilmu pengetahuan sebagai bentuk ibadah.
- Alignment of Objectives:
- Tujuan teknis akurasi kinematika selaras dengan nilai-nilai universal seperti keberlanjutan dan kesejahteraan masyarakat, sebagaimana dijelaskan dalam Niat Kegiatan Proyek dan Kesimpulan.
- Relevance of Intent:
- Niat untuk meningkatkan efisiensi energi dan keandalan mesin langsung menjawab kebutuhan industri otomotif, sebagaimana diuraikan dalam Pendahuluan dan Pemikiran Awal.
- Sustainability Focus:
- Niat Kegiatan Proyek menekankan pengurangan konsumsi bahan bakar dan dampak lingkungan untuk mencerminkan fokus pada solusi berkelanjutan.
- Focus on Quality:
- Komitmen terhadap akurasi ditunjukkan melalui validasi hasil numerik dengan solusi analitik, memastikan keandalan dan presisi.
III. Initial Thinking (about the Problem)
- Problem Understanding:
- Pemikiran Awal dengan jelas mengidentifikasi masalah ketidakakuratan prediksi gerakan piston karena kompleksitas hubungan geometris, memberikan dasar yang kuat untuk analisis.
- Stakeholder Awareness:
- Sinopsis mempertimbangkan kebutuhan industri otomotif dan masyarakat pengguna mesin melalui fokus pada efisiensi energi dan keandalan, sebagaimana dijelaskan dalam Niat Kegiatan Proyek.
- Contextual Analysis:
- Pendahuluan dan Pemikiran Awal menempatkan masalah dalam konteks teknis kinematika mesin dan sosial kebutuhan akan efisiensi energidengan referensi ke penelitian sebelumnya.
- Root Cause Analysis:
- Menganalisis Masalah Secara Sistematis mengidentifikasi akar masalah, yaitu kompleksitas hubungan geometris dan keterbatasan model kinematika tradisional.
- Relevance of Analysis:
- Analisis dalam Pemikiran Awal berfokus pada tantangan praktis seperti efisiensi rendah dan keausan komponen, memastikan relevansi dengan kebutuhan dunia nyata.
- Use of Data and Evidence:
- Sinopsis menggunakan referensi terpercaya, seperti Tătaru et al. (2018) untuk mendukung analisis masalah dan mengidentifikasi kesenjangan penelitian.
IV. Idealization
- Assumption Clarity:
- Idealisasi dengan jelas menyatakan asumsi benda kaku, tanpa gesekan, gerakan horizontal slider dan menjustifikasi relevansinya dengan desain cylinder engine standar.
- Creativity and Innovation:
- Penggunaan metode numerik inkremental yang jarang diterapkan secara real time pada cylinder engine, menunjukkan pendekatan inovatif.
- Physical Realism:
- Model kinematika mematuhi hukum fisika, seperti hubungan trigonometri dan kendala yO3=0, sebagaimana dijelaskan dalam Model Matematika.
- Alignment with Intent:
- Idealisasi selaras dengan niat untuk mencapai efisiensi dan akurasi dengan fokus pada prediksi kinematika yang akurat .
- Scalability and Adaptability:
- Model numerik dapat diadaptasi untuk parameter geometris atau kecepatan sudut yang berbeda, sebagaimana disarankan dalam Rekomendasi.
- Simplicity and Elegance:
- Solusi numerik inkremental sederhana namun efektif, mengurangi kompleksitas komputasi sambil mempertahankan akurasi model matematiknya.
V. Instruction (Set)
- Clarity of Steps:
- Instruksi Set merinci langkah-langkah dari definisi parameter hingga visualisasi dengan jelas dan logis, memudahkan implementasi.
- Comprehensiveness:
- Instruksi mencakup semua aspek solusi, termasuk inisialisasi, perhitungan inkremental, validasi, dan visualisasi .
- Physical Interpretation:
- Hasil dan Diskusi menjelaskan makna fisik hasil, seperti variasi periodik xO3 dan kesesuaian yO3=0.
- Error Minimization:
- Prosedur validasi dengan perbandingan analitik dan penyesuaian Δt meminimalkan kesalahan.
- Verification and Validation:
- Dalam sinopsis ini terdapat metode validasi melalui perhitungan kesalahan relatif dan verifikasi yO3=0 .
- Iterative Approach:
- Validasi dan Penyempurnaan menunjukkan kesiapan untuk mengulang simulasi dengan Δt yang lebih kecil jika diperlukan.
- Sustainability Integration:
- Fokus pada efisiensi energi dalam Niat Kegiatan Proyek dan Kesimpulan mencerminkan praktik berkelanjutan dalam solusi.
- Communication Effectiveness:
- Instruksi disajikan dengan bahasa yang jelas dan plot visual yang mudah dipahami, cocok untuk audiens teknis.
- Alignment with the DAI5 Framework:
- Solusi numerik selaras dengan langkah-langkah DAI5, dari kesadaran spiritual hingga idealisasi teknis.
- Documentation Quality:
- Aplikasi metode numerik ini terdokumentasi dengan struktur yang jelas dengan modelling persamaan matematikanya, simulasi dengan Python, dan Visualiasi hasil simulasi.