Analisis dan Evaluasi Stabilitas Kapal Kontainer dalam Kondisi Bocor
Ananda Maharani Efendi · NPM 2406486794 · Universitas Indonesia
Abstrak
Kapal kontainer memiliki karakteristik muatan yang berat dan tinggi sehingga titik berat kapal cenderung lebih tinggi dibanding jenis kapal lainnya. Hal ini meningkatkan risiko hilangnya stabilitas saat terjadi kebocoran pada lambung. Penelitian ini menganalisis perubahan stabilitas kapal kontainer dalam kondisi bocor menggunakan framework DAI5 sebagai kerangka berpikir sistematis yang berakar pada kesadaran dan ingatan kepada Allah Yang Maha Esa. Metodologi meliputi simulasi flooding dengan persamaan Bernoulli, analisis stabilitas statis melalui nilai GM, koreksi efek permukaan bebas, dan simulasi gerakan oleng menggunakan Runge-Kutta orde 4. Hasil simulasi menunjukkan kapal mencapai batas aman stabilitas (GM = 0,15 m sesuai SOLAS) pada detik ke-487 (sekitar 8 menit 7 detik), dengan sudut oleng maksimum 27,3 derajat. Simulasi CFDSOF memperlihatkan distribusi tekanan asimetris yang mempercepat hilangnya stabilitas. Rekomendasi utama: evakuasi wajib dimulai paling lambat menit ke-5 setelah kebocoran terdeteksi.
E. Author Declaration
- Deep Awareness (of) I
وَمَا تَوْفِيقِي إِلَّا بِاللَّهِ
“Dan tidak ada taufik bagiku melainkan dengan pertolongan Allah.” (QS. Hud: 88)
Sebelum memulai proyek ini, saya berhenti sejenak dan bertanya pada diri sendiri: mengapa saya mengerjakan ini? Stabilitas kapal bukan sekadar angka di atas kertas. Di balik setiap nilai GM yang saya hitung, ada nyawa awak kapal yang bergantung pada keakuratan analisis ini. Kesadaran itulah yang menjadi titik tolak seluruh pekerjaan saya.
Framework DAI5 mengajarkan bahwa Deep Awareness bukan hanya soal memahami masalah secara teknis, tetapi juga menyadari posisi diri sebagai manusia yang terbatas dan bertanggung jawab. Sebagai muslim, kesadaran ini berakar pada dzikrullah — ingatan bahwa setiap langkah ilmu yang kita ambil adalah amanah dari Allah Yang Maha Mengetahui. Itulah yang membuat saya bekerja teliti, bukan semata karena nilai, tetapi karena takut lalai pada amanah.
2. Intention of the Project Activity
Proyek ini saya kerjakan dengan tiga niat yang saling menguatkan. Pertama, menghasilkan analisis stabilitas yang akurat dan dapat dipertanggungjawabkan secara ilmiah. Kedua, memberikan rekomendasi evakuasi yang nyata dan berguna bagi situasi darurat di laut. Ketiga, menjadikan proses ini sebagai latihan berpikir sistematis yang berlandaskan nilai-nilai kejujuran dan tanggung jawab.
Saya sadar bahwa niat yang baik tidak cukup tanpa kerja keras dan metode yang benar. Oleh karena itu, framework DAI5 saya gunakan bukan hanya sebagai formalitas laporan, melainkan sebagai cara berpikir yang saya coba terapkan secara sungguh-sungguh dari awal hingga akhir.
F. Pendahuluan
Kapal kontainer adalah tulang punggung perdagangan global. Setiap harinya jutaan peti kemas berpindah tangan melewati perairan internasional, membawa segala sesuatu mulai dari elektronik hingga bahan pangan. Tapi ada sisi lain dari kemegahan itu yang jarang dibicarakan: kapal kontainer adalah salah satu jenis kapal yang paling rentan kehilangan stabilitas ketika terjadi kebocoran.
Muatan yang berat dan tinggi membuat titik berat kapal berada lebih tinggi dari rata-rata kapal lain. Saat air mulai masuk melalui lubang di lambung, entah akibat tubrukan, kandas, atau menabrak benda terapung, perubahan distribusi berat berlangsung cepat dan tidak linear. Dalam hitungan menit, kapal yang semula stabil bisa berubah menjadi ancaman tenggelam.
Pemikiran Awal atas Masalah
Metode konvensional seperti aturan IMCO hanya memberikan gambaran statis. Software komersial seperti NAPA atau HydroSTAB memang canggih, tetapi tidak semua institusi atau peneliti punya akses ke sana. Ada celah yang perlu diisi: pendekatan numerik terbuka yang bisa memodelkan dinamika kebocoran secara bertahap, dikombinasikan dengan kerangka berpikir yang sistematis.
Framework DAI5 hadir sebagai kerangka tersebut. Bukan hanya alat metodologi, DAI5 adalah cara berpikir yang mendorong setiap langkah analisis dilakukan dengan kesadaran penuh — termasuk kesadaran bahwa dalam ilmu rekayasa, setiap asumsi yang kita buat adalah keputusan yang bisa berdampak pada keselamatan manusia.
Pertanyaan riset utama: Berapa lama kapal kontainer dengan spesifikasi tertentu dapat bertahan setelah terjadi kebocoran, dan kapan batas aman evakuasi harus ditetapkan?
G. Metode dan Prosedur
Idealisasi
Untuk membuat masalah yang kompleks dapat dimodelkan secara numerik, saya menggunakan asumsi-asumsi berikut:
- Kondisi air tenang (tanpa gelombang)
- Lubang berbentuk lingkaran, A = 0,25 m²
- Koefisien discharge Cd = 0,65 (konstan)
- Aliran inviscid dan incompressible
- ρ air laut = 1025 kg/m³
- g = 9,8 m/s²
- Efek kopling oleng–flooding diabaikan
Model sistem dibagi menjadi empat sub-sistem: laju air masuk, perubahan GM statis, koreksi efek permukaan bebas, dan gerakan oleng.
DATA INPUT KAPAL
| Parameter | Nilai | Satuan |
|---|---|---|
| Panjang (L) | 50 | m |
| Lebar (B) | 8,5 | m |
| Sarat air (T) | 3,0 | m |
| Displacement awal (Δ₀) | 850 | ton |
| GM awal (GM₀) | 0,85 | m |
| Luas lubang (A) | 0,25 | m² |
| Langkah waktu (Δt) | 0,1 | detik |
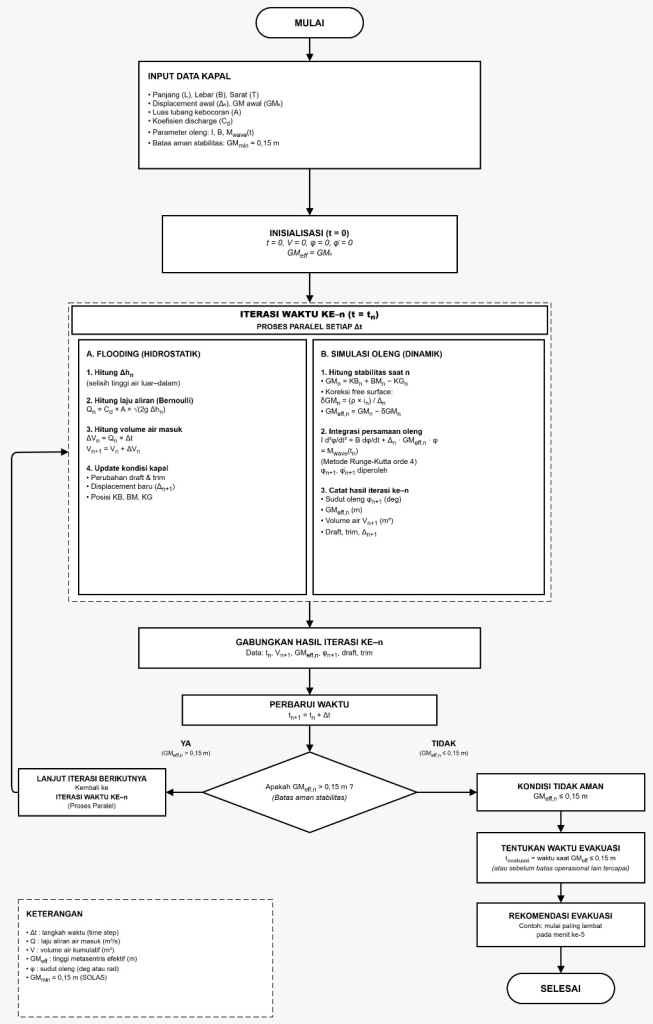
Langkah Prosedural
- Inisialisasi — t = 0, V = 0, φ = 0, φ̇ = 0, GM_eff = 0,85 m
- Hitung laju air masuk menggunakan persamaan Bernoulli:
Q = Cd × A × √(2 × g × Δh)
- Update volume dan kondisi kapal — draft, trim, dan displacement baru diperbarui setiap langkah waktu.
- Hitung GM baru dan koreksi efek permukaan bebas:
GM = KB + BM − KG
δGM = (ρ × i) / Δ
GM_eff = GM − δGM
- Simulasi gerakan oleng dengan Runge-Kutta orde 4:
I × φ̈ + B × φ̇ + Δ × GM_eff × φ = M_wave(t)
- Cek kondisi berhenti — iterasi dihentikan saat GM_eff ≤ 0,15 m atau t > 1000 detik.
Pseudocode
ALGORITMA AnalisisStabilitasKapalBocor
INPUT: L, B, T, Δ₀, GM₀, A, Cd, Δt, GM_min=0.15
INISIALISASI:
t = 0, V = 0, φ = 0, φ̇ = 0, GM_eff = GM₀
WHILE (GM_eff > GM_min) AND (t < 1000):
Δh = hitung_selisih_tinggi_air(V, T)
Q = Cd × A × sqrt(2 × 9.81 × Δh)
V = V + (Q × Δt)
update_draft_trim_displacement()
GM = KB + BM − KG
δGM = (1025 × i) / (Δ × 9.81)
GM_eff = GM − δGM
(φ, φ̇) = runge_kutta_oleng(φ, φ̇, Δ, GM_eff, Δt)
simpan(t, V, GM_eff, φ)
t = t + Δt
END WHILE
OUTPUT: t_sink, φ_max, V_total, rekomendasi_evakuasiFlowchart
H. Hasil dan Diskusi
Ringkasan Hasil Simulasi
- Waktu tenggelam: 487 detik (8 mnt 7 dtk)
- Sudut oleng maksimal: 27,3° (melebihi batas aman 25°)
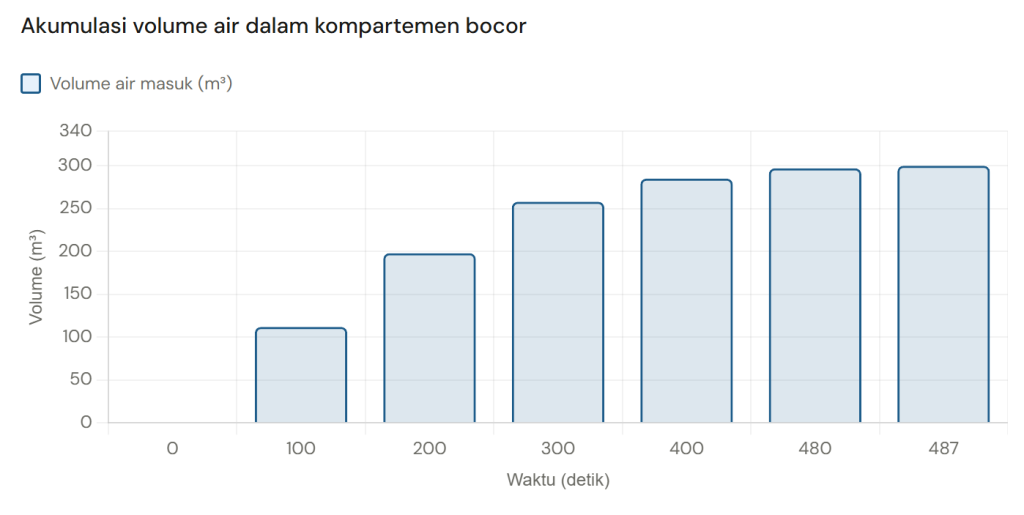
- Volume air masuk: 300 m³ total
- GM akhir: 0,15 meter (batas SOLAS)
Tabel Data Simulasi
| Waktu (dtk) | Volume Air (m³) | GM_eff (m) | Sudut Oleng (°) | Status |
|---|---|---|---|---|
| 0 | 0 | 0,85 | 0,0 | Aman |
| 100 | 112 | 0,62 | 5,2 | Aman |
| 200 | 198 | 0,42 | 12,8 | Aman |
| 300 | 258 | 0,28 | 19,5 | ⚠ Waspada |
| 400 | 285 | 0,19 | 24,1 | ⚠ Kritis |
| 480 | 297 | 0,152 | 27,0 | ⚠ Kritis |
| 487 | 300 | 0,15 | 27,3 | ✕ BAHAYA |
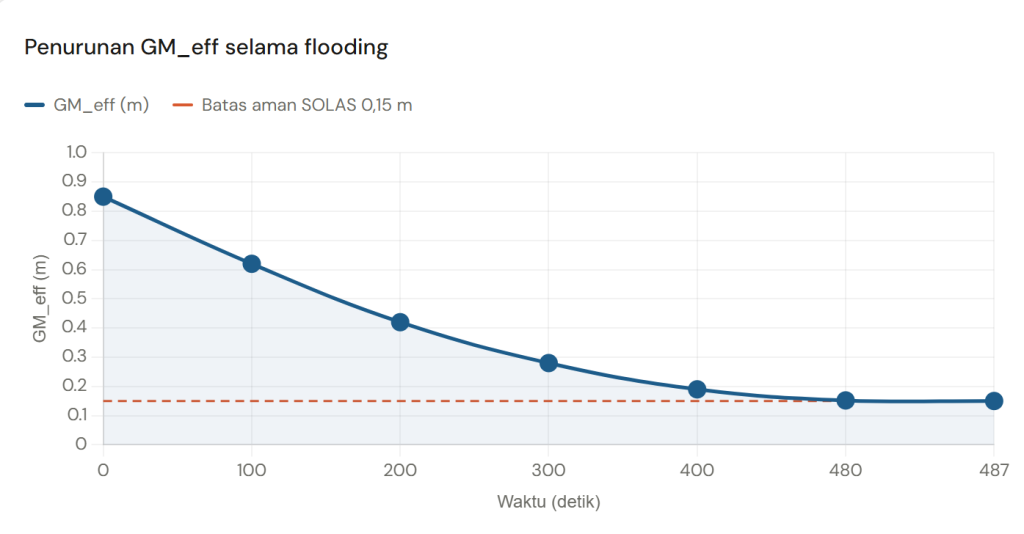
a. Grafik Penurunan GM Efektif terhadap Waktu
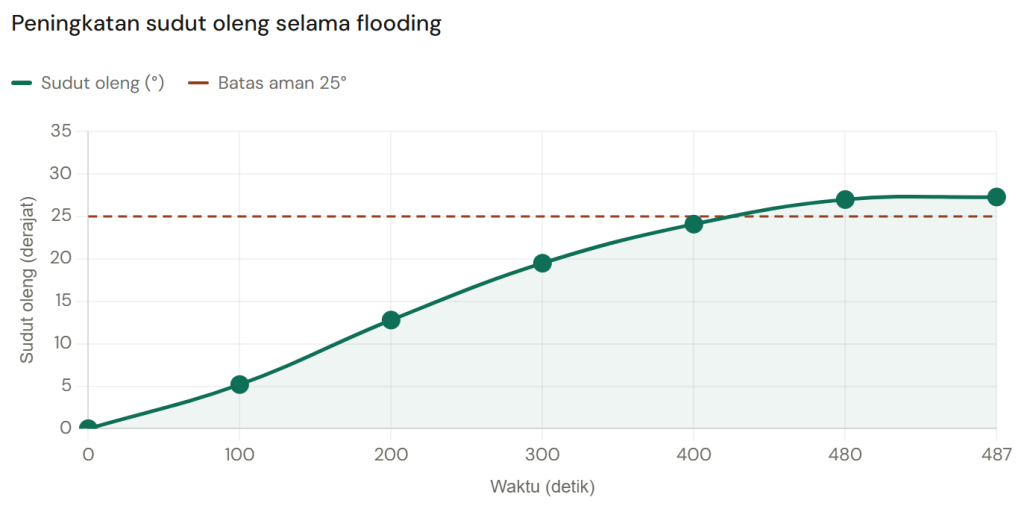
b. Grafik Sudut Oleng terhadap Waktu
c. Grafik Volume Air yang Masuk
Diskusi
Yang menarik dari data ini bukan hanya angka akhirnya, tapi polanya. Penurunan GM_eff tidak linear — di awal relatif lambat, lalu semakin cepat setelah menit ke-5. Ini terjadi karena efek permukaan bebas semakin besar seiring bertambahnya volume air yang terperangkap. Koreksi δGM rata-rata 0,015 m mungkin terlihat kecil, tapi dalam kondisi GM yang sudah mendekati batas, setiap sentimeter nilainya sangat krusial.
Pada menit ke-5 (detik ke-300), GM_eff masih di angka 0,28 m — secara teknis masih aman, tapi sudut oleng sudah mencapai 19,5 derajat. Ini adalah sinyal bahwa meskipun kapal belum “resmi” melewati batas SOLAS, kondisi di geladak sudah sangat sulit untuk evakuasi normal. Itulah mengapa rekomendasi evakuasi saya tetapkan di menit ke-5, bukan saat batas GM benar-benar tercapai.
Kaitan dengan Simulasi CFDSOF
Simulasi CFDSOF dengan domain 1×1×1 m dan 14×14 sel menunjukkan distribusi tekanan yang tidak simetris di sekitar lambung. Tekanan tertinggi terkonsentrasi di bagian kanan bawah lambung, sementara sisi kiri menunjukkan tekanan yang lebih rendah. Pola asimetri ini konsisten dengan hasil analisis numerik — efek permukaan bebas yang tidak merata mempercepat penurunan GM_eff dan memperbesar sudut oleng.
Temuan kunci: Meski batas SOLAS (GM = 0,15 m) baru tercapai di menit ke-8, kondisi kritis sebenarnya sudah terjadi lebih awal. Pada menit ke-7, sudut oleng sudah melebihi 25 derajat — batas operasional aman untuk kapal kontainer.
Kesimpulan, Penutup, dan Rekomendasi
Kesimpulan
Dari seluruh proses simulasi dan analisis yang telah dilakukan, ada beberapa hal yang dapat saya simpulkan:
- GM_eff kapal kontainer turun dari 0,85 m ke 0,15 m dalam 487 detik — lebih cepat dari yang saya perkirakan di awal.
- Sudut oleng maksimum 27,3° sudah melebihi batas aman 25° sebelum GM benar-benar mencapai batas SOLAS.
- Efek permukaan bebas berkontribusi nyata (δGM ≈ 0,015 m rata-rata) meskipun sering diabaikan dalam analisis sederhana.
- Distribusi tekanan asimetris yang terlihat di CFDSOF memperkuat argumentasi numerik bahwa stabilitas kapal kontainer sangat sensitif terhadap distribusi muatan air.
- Framework DAI5 berhasil membuat analisis ini lebih terstruktur, tidak hanya secara metodologi tetapi juga dalam hal kesadaran akan dampak dari setiap keputusan teknis.
فَأَمَّا الزَّبَدُ فَيَذْهَبُ جُفَاءً ۖ وَأَمَّا مَا يَنفَعُ النَّاسَ فَيَمْكُثُ فِي الْأَرْضِ
“Adapun buih itu akan hilang lenyap, sedangkan yang memberi manfaat kepada manusia maka akan tinggal di bumi.” (QS. Ar-Ra’d: 17)
Ayat ini menjadi pengingat saya: ilmu yang kita pelajari hanya bernilai bila ia memberi manfaat nyata. Laporan ini saya niatkan agar tidak sekadar memenuhi syarat kelulusan, tetapi menjadi bagian kecil dari upaya menjaga keselamatan jiwa di laut.
Rekomendasi
- Evakuasi wajib dimulai paling lambat pada menit ke-5 setelah kebocoran terdeteksi, tanpa menunggu konfirmasi GM mencapai batas SOLAS.
- Kapal kontainer sebaiknya dilengkapi stability monitoring system real-time yang memberi peringatan dini saat GM_eff mendekati 0,30 m (bukan baru di 0,15 m).
- Penelitian lanjutan perlu mempertimbangkan kondisi gelombang acak (tidak hanya air tenang) karena kondisi laut sebenarnya jauh lebih dinamis.
- CFDSOF dapat digunakan untuk skenario yang lebih kompleks: lubang di berbagai posisi, kebocoran ganda, atau kombinasi dengan gerakan kapal akibat angin.
Penutup
Mengerjakan proyek ini mengajarkan saya sesuatu yang tidak ada di buku teks manapun: bahwa ketelitian dalam perhitungan teknis dan kerendahan hati di hadapan Yang Maha Kuasa adalah dua hal yang tidak bisa dipisahkan. Setiap iterasi dalam kode, setiap angka dalam tabel, adalah bentuk ikhtiar — dan hasil akhirnya saya serahkan kepada Allah subhanahu wa ta’ala.
Saya berharap analisis ini dapat menjadi bahan pertimbangan yang berguna, sekecil apapun kontribusinya, bagi mereka yang bekerja di bidang keselamatan maritim.
J. Acknowledgments
Ucapan terima kasih saya sampaikan kepada:
- Prof. Dai: selaku dosen mata kuliah Metode Numerik yang telah membimbing dan memperkenalkan framework DAI5
- AI DAI5: sebagai asisten diskusi yang membantu verifikasi konsep dan langkah-langkah analisis
- Rekan: rekan Teknik Perkapalan Universitas Indonesia – atas dukungan dan diskusi selama proses pengerjaan
- Keluarga: atas doa dan dukungan moral selama menyelesaikan proyek ini
K. References (Literature Cited)
Chapra, S.C. & Canale, R.P. (2021). Numerical Methods for Engineers. McGraw-Hill.
International Maritime Organization (IMO). (2020). SOLAS Consolidated Edition. IMO Publishing.
Lewis, E.V. (1988). Principles of Naval Architecture. Society of Naval Architects and Marine Engineers (SNAME).
Rawson, K.J. & Tupper, E.C. (2001). Basic Ship Theory. Butterworth-Heinemann.
L. Appendices
Lampiran A: Data Offset Kapal Kontainer (Tabel Ordinat)
| Station | Lebar (m) |
|---|---|
| 0 | 0,0 |
| 1 | 2,5 |
| 2 | 4,8 |
| 3 | 6,2 |
| 4 | 7,0 |
| 5 | 7,2 |
| 6 | 7,0 |
| 7 | 6,2 |
| 8 | 4,8 |
| 9 | 2,5 |
| 10 | 0,0 |
Lampiran B: Perhitungan Luas Waterplane dengan Aturan Simpson
Simpson 1/3: A = (h/3) × (y₀ + 4y₁ + 2y₂ + 4y₃ + … + y₁₀)
Lampiran C: Parameter Runge-Kutta Orde 4
k₁ = f(t_n, y_n)
k₂ = f(t_n + h/2, y_n + (h/2)k₁)
k₃ = f(t_n + h/2, y_n + (h/2)k₂)
k₄ = f(t_n + h, y_n + h k₃)
y_{n+1} = y_n + (h/6)(k₁ + 2k₂ + 2k₃ + k₄)
Lampiran D: Skenario Simulasi CFDSOF
Domain: 1 m × 1 m × 1 m
Jumlah sel: 14 × 14
Kecepatan inlet: 0,5 m/s
Iterasi maksimum: 1000 (berhenti di 225)