A. Project Title
Pemodelan Simulasi Seakeeping Menggunakan ANSYS AQWA,
Mencakup Kondisi Kapal Diam (Kecepatan Nol) dan Kapal Bergerak
(Kecepatan Maju) Dengan Variasi Frekuensi Gelombang Serta Arah
Datang Delombang.
B. Author Complete Name
Achmad Hafidz Ramadhan
NPM 2406347014
C. Affiliation
Departemen Teknik Perkapalan
Fakultas Teknik Universitas Indonesia
Mata Kuliah Metode Numerik – 03
D. Abstract
Penelitian ini membahas analisis seakeeping pada silinder vertikal terapung menggunakan perangkat lunak ANSYS AQWA 2026 R1 yang berbasis teori aliran potensial dan metode Boundary Element Method (BEM). Tujuan penelitian ini adalah menganalisis respons gerak struktur akibat eksitasi gelombang reguler dengan variasi frekuensi dan arah datang gelombang. Model yang digunakan berupa silinder vertikal dengan diameter 7 m, panjang total 14 m, dan draft 5 m. Simulasi dilakukan pada kondisi perairan dalam (deep water) dengan kecepatan maju nol (zero forward speed). Parameter hidrodinamika yang dianalisis meliputi Response Amplitude Operator (RAO) untuk gerakan heave, roll, dan pitch, koefisien added mass, radiation damping, serta gaya eksitasi Froude-Krylov dan difraksi.
Hasil simulasi menunjukkan bahwa gerakan heave merupakan moda gerak yang paling dominan dengan nilai RAO maksimum sebesar 100,16 m/m pada frekuensi resonansi 0,04283 Hz. Respons pitch mencapai nilai maksimum pada frekuensi 0,12356 Hz, sedangkan respons roll relatif kecil akibat geometri silinder yang simetris. Analisis juga menunjukkan bahwa nilai added mass dan radiation damping dipengaruhi oleh frekuensi gelombang dan berperan penting dalam menentukan karakteristik dinamis struktur. Selain itu, hasil hidrostatik menunjukkan nilai metacentric height (GM) negatif yang mengindikasikan bahwa struktur berada dalam kondisi tidak stabil secara statik dan memerlukan perbaikan desain, seperti penambahan ballast atau sistem mooring. Secara keseluruhan, penelitian ini menunjukkan bahwa ANSYS AQWA mampu digunakan untuk memprediksi karakteristik hidrodinamika dan performa seakeeping struktur terapung secara efektif pada berbagai kondisi gelombang.
Kata kunci: Seakeeping, ANSYS AQWA, RAO, Added Mass, Radiation Damping, Silinder Terapung.
E. Author Declaration
1. Deep Awareness of I
Dalam pelaksanaan proyek ini, saya memahami bahwa kegiatan rekayasa tidak hanya berfokus pada perhitungan teknis dan analisis matematis, tetapi juga mengandung tanggung jawab besar terhadap keselamatan sistem serta para pengguna yang akan berinteraksi dengan hasil desain tersebut. Melalui penerapan framework DAI5, saya menyadari pentingnya kesadaran diri dalam setiap tahapan analisis dan pengambilan keputusan. Selain itu, saya meyakini bahwa pengetahuan dan kemampuan berpikir yang dimiliki merupakan anugerah dari Tuhan Yang Maha Esa yang harus digunakan secara bijaksana. Oleh karena itu, setiap keputusan dalam proses perancangan perlu mempertimbangkan aspek keselamatan, efisiensi, etika profesi, serta dampak positif yang dapat diberikan kepada lingkungan dan masyarakat.
2. Intention of the Project Activity
Tujuan simulasi ini adalah memodelkan perilaku hidrodinamika silinder vertikal terapung terhadap pengaruh gelombang menggunakan pendekatan numerik berbasis Boundary Element Method (BEM) yang diimplementasikan dalam perangkat lunak ANSYS AQWA. Melalui simulasi numerik ini, dilakukan perhitungan respons gerak struktur dalam domain frekuensi, meliputi heave, roll, dan pitch yang dinyatakan dalam bentuk Response Amplitude Operator (RAO). Selain itu, simulasi juga digunakan untuk memperoleh parameter hidrodinamika penting seperti added mass, radiation damping, serta gaya eksitasi gelombang yang terdiri dari gaya Froude–Krylov dan gaya difraksi. Hasil yang diperoleh kemudian dianalisis untuk memahami pengaruh variasi frekuensi dan arah datang gelombang terhadap karakteristik respons struktur terapung serta mengidentifikasi kondisi yang berpotensi menimbulkan resonansi dan memengaruhi performa seakeeping struktur.
F. Introduction
BAB I
PENDAHULUAN
1.1. Latar Belakang
Seakeeping merupakan cabang ilmu hidrodinamika kapal yang membahas kemampuan suatu benda terapung untuk merespons gerakan akibat eksitasi gelombang laut. Pemahaman mendalam tentang respons gerak benda di bawah aksi gelombang reguler sangat penting dalam perancangan struktur laut karena secara langsung terhadap keamanan operasional, integritas struktural, dan kinerja sistem secara keseluruhan.
Pada laporan ini, objek yang dianalisis adalah silinder vertikal terapung berukuran besar dengan diameter 7 m, panjang total 14 m, dan draft 5 m. Dengan skala dimensi seperti ini, silinder dapat merepresentasikan berbagai struktur offshore seperti spar platform, FPSO (Floating Production Storage and Offloading), atau komponen mooring buoy berskala industri. Silinder dipilih sebagai objek kajian karena memiliki geometri yang simetris, sehingga memudahkan proses analisis yang lebih terstruktur serta memungkinkan validasi numerik dilakukan dengan lebih baik.
Analisis ini dilakukan menggunakan ANSYS AQWA 2026 R1, yang menyelesaikan permasalahan difraksi dan radiasi gelombang dengan menggunakan metode panel (Boundary Element Method/BEM) yang didasarkan pada teori aliran potensial. Output utama yang dianalisis meliputi RAO heave, roll, pitch, koefisien added mass, radiation damping, serta gaya eksitasi Froude-Krylov dan difraksi.
1.2. Rumusan Masalah
- Bagaimana karakteristik RAO heave, pitch, dan roll pada silinder vertikal terhadap perubahan frekuensi gelombang untuk berbagai arah datang gelombang?
- Bagaimana variasi koefisien hidrodinamika, khususnya added mass dan radiation damping, terhadap perubahan frekuensi gelombang?
- Bagaimana karakteristik gaya eksitasi Froude-Krylov dan gaya difraksi terhadap perubahan frekuensi pada arah datang gelombang 180°?
- Pada rentang frekuensi berapa respons resonansi terjadi, serta bagaimana dampaknya terhadap keselamatan dan keandalan operasi struktur terapung?
1.3. Tujuan
- Membangun model simulasi hydrodynamic diffraction silinder vertikal menggunakan ANSYS AQWA serta menganalisis RAO pada mode gerak heave, roll, dan pitch.
- Menganalisis pengaruh variasi frekuensi gelombang terhadap koefisien hidrodinamika, khususnya added mass dan radiation damping.
- Mengidentifikasi frekuensi resonansi serta arah datang gelombang kritis yang menghasilkan respons gerak terbesar.
- Menginterpretasikan hasil simulasi secara fisik dan mengevaluasi respons struktur berdasarkan pertanyaan utama yang ditetapkan dalam tugas.
BAB II
DESKRIPSI OBJEK
2.1. Dimensi Utama
Objek yang dianalisis dalam laporan ini adalah silinder vertikal terapung yang didesain menggunakan Autodesk Inventor dan diimpor ke ANSYS AQWA dalam format IGES (.igs). Silinder ini dapat merepresentasikan spar platform berskala menengah atau mooring buoy besar. Dimensi utama disajikan pada Tabel 2.1.
| Parameter | Nilai | Satuan |
|---|---|---|
| Diameter | 7 | m |
| Radius | 3,5 | m |
| Panjang Total | 14 | m |
| Draft (tercelup) | 5 | m |
| Volume cylinder (Inventor) | 538,783 | m³ |
Tabel 2.1. Dimensi Utama Silinder Vertikal
2.2. Sifat Massa dan Inersia
Sifat massa dan momen inersia dihitung menggunakan Autodesk Inventor dengan tingkat kesalahan relatif sangat kecil (0,000580–0,000882%). Tabel 2.2 menampilkan semua parameter yang digunakan sebagai input dalam model ANSYS AQWA.
| Parameter | Simbol | Nilai | Satuan |
|---|---|---|---|
| Massa total | m | 4164793,673 | kg |
| Pusat gravitasi (X) | CoGX | 0,000 | m |
| Pusat gravitasi (Y) | CoGY | 0,000 | m |
| Pusat gravitasi (Z) | CoGZ | 7,000 | m |
| Momen inersia Ixx (CoG) | Ixx | 80779643,947 | kg·m² |
| Momen inersia Iyy (CoG) | Iyy | 80779643,947 | kg·m² |
| Momen inersia Izz (CoG) | Izz | 25509361,247 | kg·m² |
Tabel 2.2. Sifat Massa dan Inersia Silinder
2.3. Asumsi Pemodelan
- Silinder diasumsikan sebagai benda tegar (rigid body) yang dapat bergerak bebas dalam enam derajat kebebasan atau 6 DOF.
- Sistem mooring tidak dimodelkan, sehingga silinder dianggap sebagai struktur free-floating.
- Fluida diasumsikan sebagai fluida ideal, yaitu inviscid dan incompressible, sehingga pendekatan teori aliran potensial dapat digunakan.
- Gelombang yang digunakan merupakan gelombang reguler linier berdasarkan teori Airy wave dengan amplitudo satuan sebesar 1 m.
- Analisis dilakukan pada kondisi zero forward speed, sehingga tidak terdapat kecepatan maju pada silinder.
BAB III
METODE NUMERIK
3.1. ANSYS AQWA dan Metode Panel
ANSYS AQWA menggunakan Source Strength Distribution Method, yaitu metode panel berbasis Boundary Element Method (BEM), untuk menyelesaikan persamaan Laplace pada potensial kecepatan fluida di sekitar benda tercelup. Dalam metode ini, singularitas berupa source atau dipole didistribusikan pada permukaan benda yang telah didiskretisasi menjadi panel-panel datar.
Berdasarkan distribusi potensial tersebut, ANSYS AQWA menghitung berbagai parameter hidrodinamika, meliputi gaya Froude-Krylov, gaya difraksi, gaya radiasi (added mass dan radiation damping), kekakuan hidrostatik, serta Response Amplitude Operator (RAO) untuk setiap moda gerak.
Persamaan gerak enam derajat kebebasan (6-DOF) yang diselesaikan oleh AQWA dapat dituliskan sebagai:
[-ω² (M + A(ω)) + iω B(ω) + C] X = F(ω)
dengan keterangan:
- A(ω) = matriks added mass
- B(ω) = matriks radiation damping
- C = matriks kekakuan hidrostatik
- F(ω) = vektor gaya eksitasi kompleks
- X = vektor amplitudo gerak kompleks
Nilai RAO didefinisikan sebagai perbandingan antara amplitudo respons gerak terhadap amplitudo gelombang, yaitu:
RAO = |X| / A_gelombang
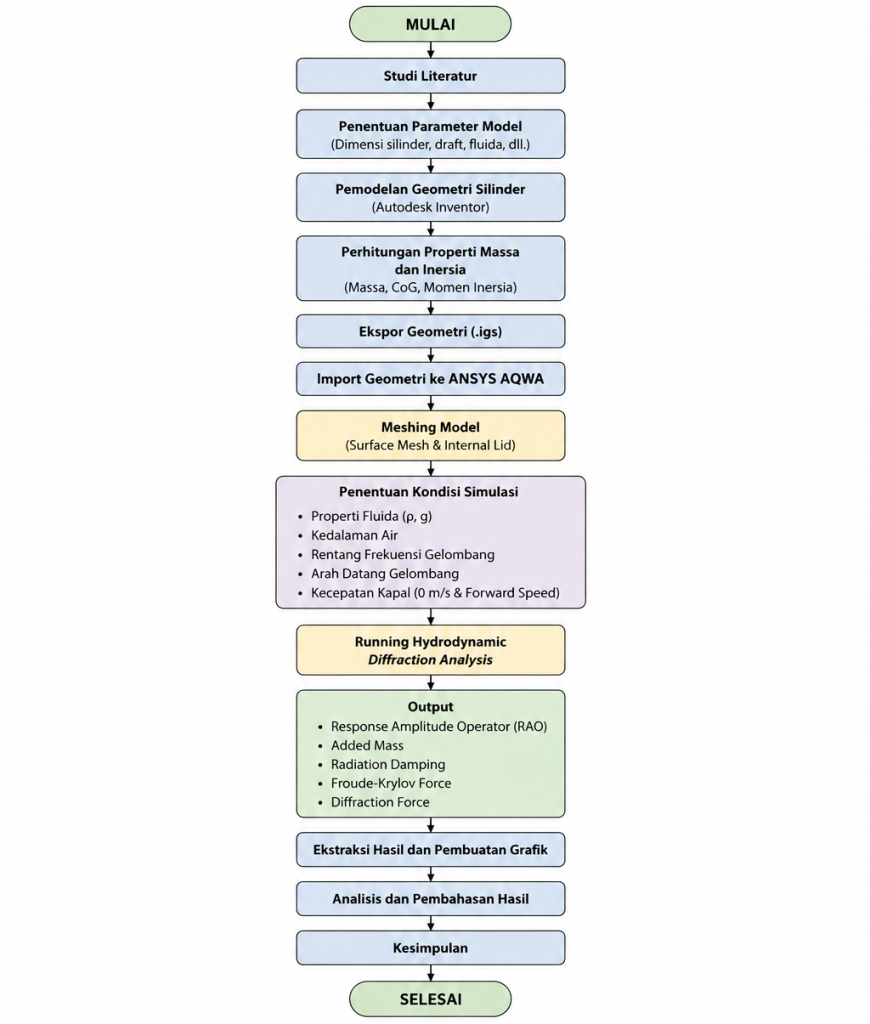
3.2 Flowchart Pengerjaan
3.3. Persiapan Geometri dan Mesh
Geometri silinder terdiri dari dua body: bagian tercelup (Draft, T = 5 m) dan tutup atas (Top). AQWA menghasilkan internal lid secara otomatis pada bidang garis air. Parameter mesh disajikan pada Tabel 3.1.
| Parameter Mesh | Nilai |
|---|---|
| Ukuran elemen (program controlled) | 1,32592 m |
| Frekuensi maksimum yang dapat dianalisis | 0,39653 Hz |
| Total node | 272 |
| Total elemen | 270 |
| Internal lid | Ya (otomatis) |
| Connection tolerance | 0,13259 m |
Tabel 3.1. Parameter Mesh Model ANSYS AQWA
3.4. Kondisi Analisis
| Parameter | Nilai |
|---|---|
| Rentang frekuensi | 0,01592 – 0,24621 Hz (100 titik) |
| Arah gelombang | 9 arah: −180° s/d +180° (interval 45°) |
| Kecepatan maju | Zero forward speed |
| Amplitudo gelombang | 1 m (unit amplitude) |
| Kedalaman air | 1000 m (deep water) |
| Densitas air laut | 1025 kg/m³ |
| Percepatan gravitasi | 9,80665 m/s² |
| Kalkulasi QTF | Full QTF Matrix |
| Perangkat lunak | ANSYS AQWA 2026 R1 |
Tabel 3.2. Setup Kondisi Analisis
H. Result & Discussion
BAB IV
HASIL
4.1. Hasil Hidrostatik
Hasil analisis hidrostatik AQWA disajikan pada Gambar 4.1. Nilai-nilai tersebut menggambarkan kondisi kesetimbangan silinder di permukaan air.
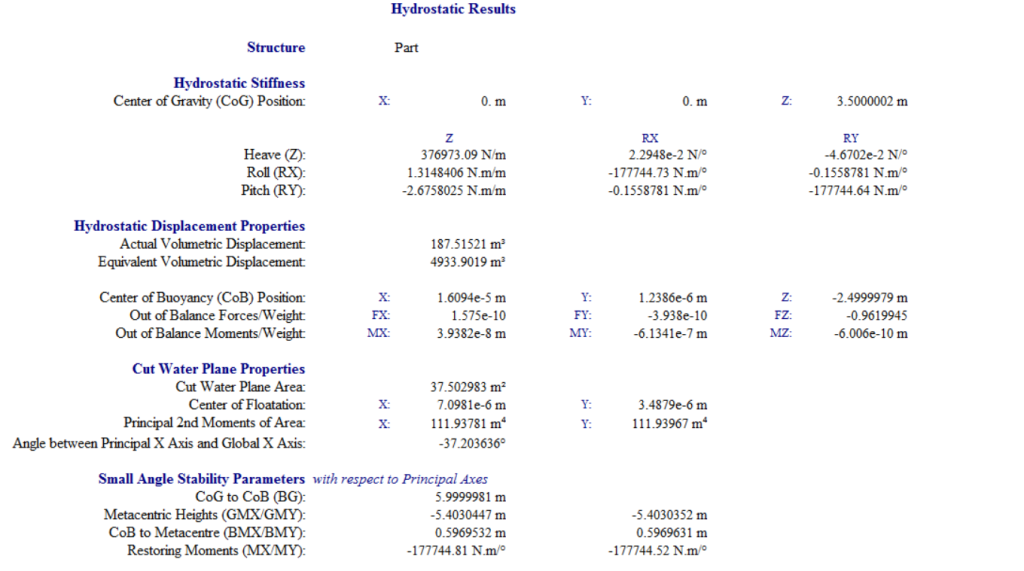
Gambar 4.1. Hasil Analisis Hidrostatik
Berdasarkan hasil hidrostatik, posisi center of gravity (CoG) berada pada Z = 3,5 m dan center of buoyancy (CoB) pada sekitar Z = -2,5 m, sehingga jarak keduanya cukup besar (≈6 m) yang menyebabkan kondisi tidak stabil. Hal ini diperkuat oleh nilai metacentric height (GMX/GMY) yang bernilai negatif sekitar -5,40 m, menunjukkan bahwa silinder tidak memiliki stabilitas hidrostatik pada sudut kecil dan cenderung tidak dapat kembali ke posisi setimbang. Selain itu, terdapat perbedaan signifikan antara actual volumetric displacement (187,52 m³) dan equivalent volumetric displacement (4933,90 m³), yang mengindikasikan kemungkinan ketidaksesuaian pada input massa atau definisi model. Secara keseluruhan, hasil ini menunjukkan bahwa konfigurasi model belum stabil dan perlu evaluasi lebih lanjut pada parameter dasar seperti massa, posisi CoG, dan draft.
4.2. Kasus Input Simulasi
| Kasus | Deskripsi | Arah Gelombang | Kecepatan |
|---|---|---|---|
| A-1 | RAO Zero Speed – Semua Arah | −180° s/d 180° | 0 m/s |
| A-2 | RAO Heave vs Frekuensi | 9 arah (45° interval) | 0 m/s |
| A-3 | RAO Roll vs Frekuensi | 9 arah (45° interval) | 0 m/s |
| A-4 | RAO Pitch vs Frekuensi | 9 arah (45° interval) | 0 m/s |
| B | Added Mass & Radiation Damping | N/A (forced motion) | N/A |
| C | Diffraction + FK Forces | Arah 180° | N/A |
Tabel 4.2. Daftar Kasus Analisis
4.3. RAO Heave, Roll, dan Pitch (Arah 180°)
Gambar 4.2 menampilkan kurva RAO heave (Global Z), roll (Global RX), dan pitch (Global RY) sebagai fungsi frekuensi gelombang pada arah datang 180° (following seas). Nilai-nilai ekstrim dari AQWA dirangkum dalam Tabel 4.3.
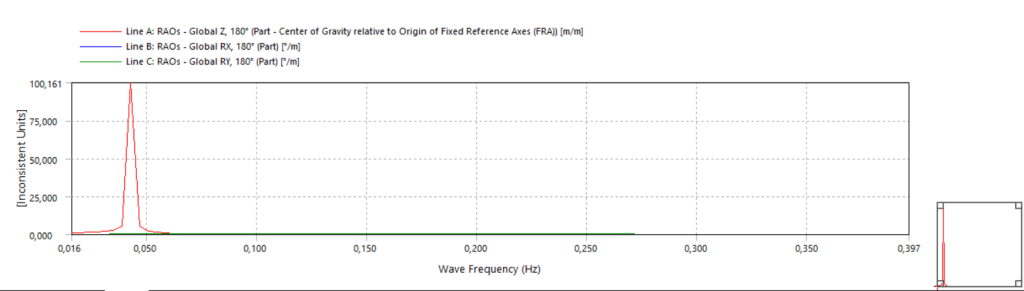
Gambar 4.2. RAO Heave, Roll, dan Pitch vs. Frekuensi Gelombang (Arah 180°)
| Gerak | Frekuensi Max. (Hz) | Nilai RAO Max. | Frekuensi Min. (Hz) | Nilai RAO Min. |
|---|---|---|---|---|
| Heave (Z) | 0,04283 | 100,16061 | 1,20376e-4 | 1,20376e-4 |
| Roll (RX) | 0,04283 | 3,23308e-4 | 0,3157 | 1,59626e-7 |
| Pitch (RY) | 0,12356 | 0,57629 | 1,20376e-4 | 0,05473 |
Tabel 4.3. Nilai Ekstrem RAO pada Arah Gelombang 180°
4.4. RAO Heave pada Berbagai Arah Gelombang
Gambar 4.2 menampilkan RAO heave untuk semua 9 arah gelombang yang dianalisis. Karena geometri silinder sepenuhnya simetris terhadap sumbu vertikal, seluruh kurva RAO heave berimpit sempurna, artinya tidak ada perbedaan antar arah gelombang.
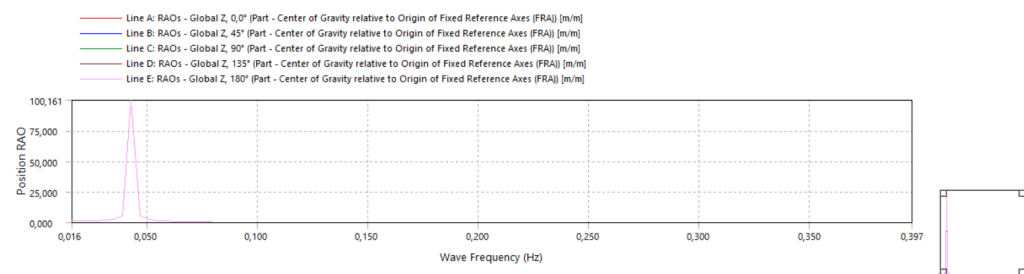
Gambar 4.3. RAO Heave untuk Berbagai Arah Gelombang (Identik karena Simetri Silinder)
4.5. RAO Pitch pada Berbagai Arah Gelombang
Gambar 4.3 menunjukkan bahwa RAO roll (RX) meningkat seiring kenaikan frekuensi hingga mencapai puncak sekitar 0,1–0,15 Hz, yang mengindikasikan terjadinya resonansi. Respons terbesar terjadi pada arah gelombang 90° (beam seas), diikuti oleh 135°, menunjukkan bahwa arah samping menghasilkan gerakan roll paling dominan. Setelah melewati frekuensi puncak, nilai RAO menurun, menandakan efek redaman (damping) semakin signifikan pada frekuensi tinggi.
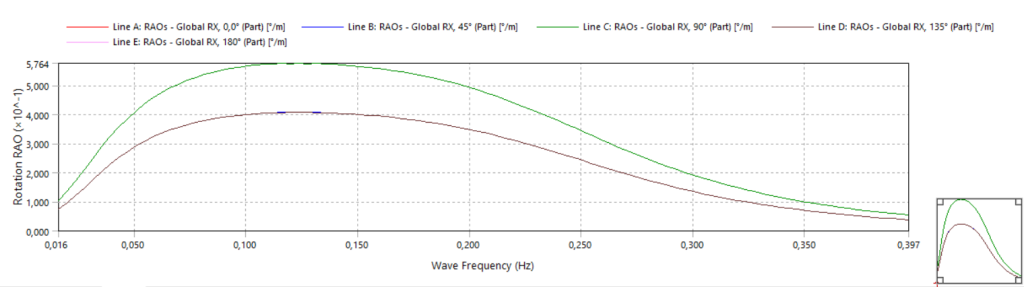
Gambar 4.4. RAO Pitch untuk Berbagai Arah Gelombang
4.6. RAO Roll pada Berbagai Arah Gelombang
Grafik menunjukkan bahwa RAO pitch (RY) meningkat dengan frekuensi dan mencapai puncak sekitar 0,1–0,15 Hz, yang menandakan terjadinya resonansi pada rentang tersebut. Respons terbesar terjadi pada arah 180° (following seas), diikuti oleh 135°, menunjukkan bahwa gelombang dari belakang memberikan pengaruh paling signifikan terhadap gerakan pitch. Setelah melewati frekuensi puncak, nilai RAO menurun secara bertahap akibat efek redaman yang semakin dominan pada frekuensi tinggi.
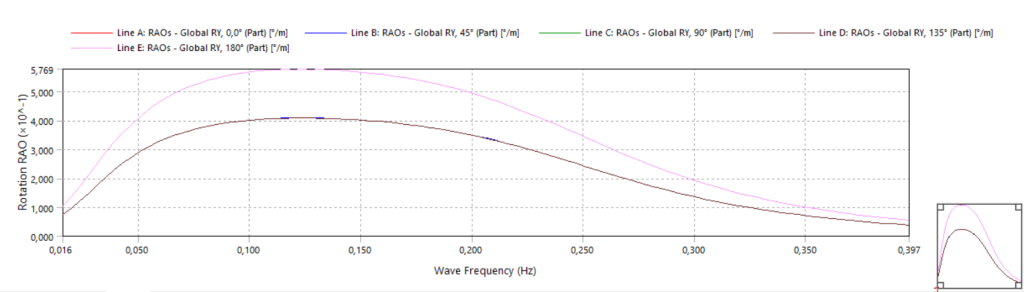
Gambar 4.5. RAO Roll untuk Berbagai Arah Gelombang
4.7. Radiation Damping vs. Frekuensi
Gambar 4.5 menampilkan koefisien radiation damping untuk heave (BZZ), roll (BRXRX), dan pitch (BRYRY) Tabel 4.4 merangkum nilai ekstremnya.
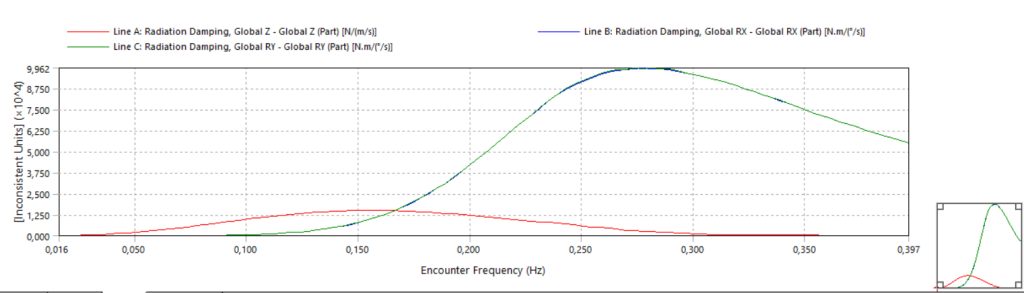
Gambar 4.5. Koefisien Radiation Damping vs. Frekuensi Gelombang
| Moda | Frek. Maks. (Hz) | Nilai Maks. | Frek. Min. (Hz) | Nilai Min. | Satuan |
|---|---|---|---|---|---|
| Heave (Z–Z) | 0,15432 | 14998,85352 | 0,39653 | 47,63302 | N/(m/s) |
| Roll (RX–RX) | 0,27734 | 99402,81027 | 0,01592 | 2,25427e-3 | N·m/(°/s) |
| Pitch (RY–RY) | 0,27734 | 99621,2295 | 0,01592 | 2,26553e-3 | N·m/(°/s) |
Tabel 4.4. Nilai Ekstrem Radiation Damping
4.8. Added Mass vs. Frekuensi
Gambar 4.6 menampilkan koefisien added mass untuk heave, roll, dan pitch. Tabel 4.5 merangkum nilai ekstremnya.
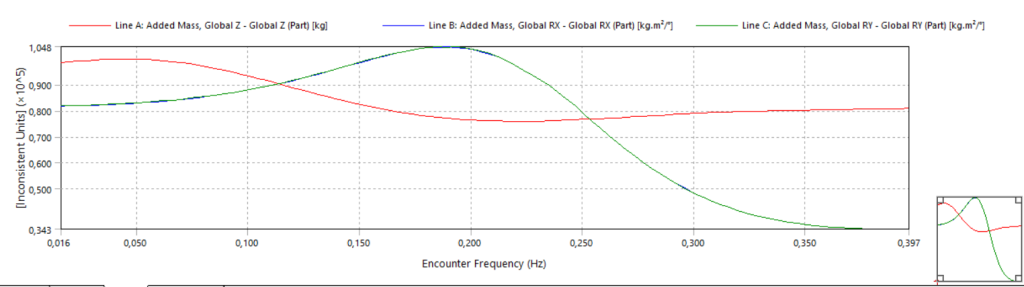
Gambar 4.6. Koefisien Added Mass vs. Frekuensi Gelombang
| Moda | Frek. Max. (Hz) | Nilai Max. | Frek. Min. (Hz) | Nilai Min. | Satuan |
|---|---|---|---|---|---|
| Heave AZZ | 0,04667 | 100014,76563 | 0,22352 | 7593,57071 | kg |
| Roll ARXRX | 0,18892 | 104660,20449 | 0,38884 | 342999,92168 | kg·m²/° |
| Pitch ARYRY | 0,18892 | 104778,20449 | 0,38884 | 34284,17663 | kg·m²/° |
Tabel 4.5. Nilai Ekstrem Added Mass
4.9. Gaya Difraksi dan Froude-Krylov
Gambar 4.7 menampilkan gaya eksitasi total (Froude-Krylov + difraksi) untuk heave, roll, dan pitch pada arah 180°. Tabel 4.6 merangkum nilai ekstremnya.
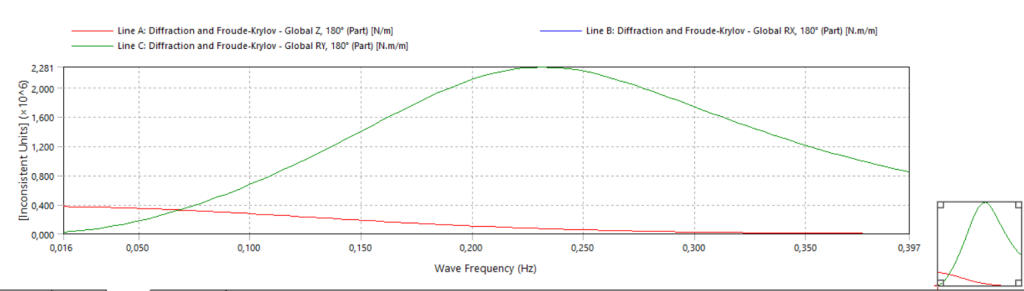
Gambar 4.7. Gaya Difraksi + Froude-Krylov vs. Frekuensi (Arah 180°)
| Komponen | Frek. Max. (Hz) | Nilai Max. | Frek. Min. (Hz) | Nilai Min. | Satuan |
|---|---|---|---|---|---|
| Heave FZ | 0,01592 | 374077,5 | 0,39653 | 3793,85742 | N/m |
| Roll MRX | 0,19661 | 342,96161 | 0,01592 | 4,48976 | N·m/m |
| Pitch MRY | 0,23505 | 2281085 | 0,01592 | 21864,60938 | N·m/m |
Tabel 4.6. Nilai Ekstrem Gaya
BAB V
PEMBAHASAN DAN ANALISIS
5.1. Moda Gerak Dominan
Berdasarkan hasil analisis RAO dari simulasi ANSYS AQWA, moda gerak yang paling dominan secara mutlak adalah heave (translasi vertikal, Global Z), dengan nilai RAO maksimum mencapai 100,161 m/m pada frekuensi resonansi 0,04283 Hz (periode T ≈ 23,35 s). Nilai ini jauh melampaui RAO pitch (RY) yang hanya mencapai 0,576°/m dan RAO roll (RX) yang bahkan lebih kecil lagi dengan nilai 3,23 × 10⁻⁴ °/m pada arah gelombang 180°.
Secara kuantitatif, dominasi heave dapat dilihat dari perbandingan nilai RAO, yaitu:
RAOheave / RAOpitch 100,161/0,576174
RAOheave / RAOroll 100,161/(3,2310-4)3,1105
yang menunjukkan bahwa respons heave jauh lebih besar dibandingkan moda gerak lainnya.
Dominasi moda heave terhadap moda gerak lainnya dapat dijelaskan melalui beberapa faktor fisik fundamental, antara lain:
- Pertama, struktur memiliki geometri silinder yang simetris terhadap sumbu vertikal, sehingga tidak terdapat eksentrisitas yang signifikan untuk memicu gerakan rotasi seperti roll dan pitch secara dominan. Akibatnya, respons terhadap gelombang lebih banyak terdistribusi pada gerakan translasi vertikal.
- Kedua, kekakuan hidrostatik heave (C33=376.973C_{33} = 376.973C33=376.973 N/m) memberikan gaya pemulih yang cukup besar, yang secara teoritis dapat dituliskan sebagai:
C33=gAw1025 × 9,81 × (π × 3,52) ≈ 3,8105 N/m
Namun, kekakuan ini tidak mampu meredam amplitudo resonansi secara efektif ketika frekuensi gelombang mendekati frekuensi natural sistem.
- Massa total silinder sebesar 4.164.793,67 kg dikombinasikan dengan added mass heave yang relatif kecil (A33 ≈1,0105 kg ), menghasilkan massa efektif:
M+A334,26106 kg
Sehingga frekuensi natural secara analitik dapat diperkirakan:
n=C33M+A333,771054,261060,29 rad/s
fn=n2=0,047 Hz
Nilai ini cukup dekat dengan frekuensi puncak RAO hasil simulasi (0,04283 Hz), yang menunjukkan bahwa puncak tersebut merupakan kondisi resonansi.
- Tidak adanya sistem mooring menyebabkan tidak terdapat kekakuan tambahan pada arah vertikal, sehingga satu-satunya mekanisme pemulih dalam arah heave hanyalah kekakuan hidrostatik.
- Radiation damping pada mode heave relatif rendah dibandingkan gaya eksitasi Froude-Krylov yang bekerja pada frekuensi resonansi, mengakibatkan rasio redaman sistem (ζ) yang sangat kecil dan puncak resonansi yang sangat tinggi dan tajam.
Dengan demikian, dapat disimpulkan bahwa moda heave merupakan gerakan paling dominan sekaligus paling kritis dalam analisis seakeeping struktur ini, karena menghasilkan respons terbesar dan sangat sensitif terhadap frekuensi gelombang di sekitar kondisi resonansi.
5.2. Analisis RAO Heave (Grafik)
Kurva RAO heave (Gambar 4.2, garis biru) memperlihatkan karakteristik respons klasik sistem berosilasi satu derajat kebebasan yang terdiri dari tiga zona utama, yaitu zona quasi-static, zona resonansi, dan zona inersia-dominan.
Pada zona frekuensi rendah (f < 0,020 Hz), panjang gelombang sangat panjang (λ > 3.900 m berdasarkan teori air dalam λ = g/2πf²), jauh lebih besar dari dimensi silinder (D = 7 m). Dalam kondisi ini, silinder bergerak secara quasi-static mengikuti pergerakan permukaan air dengan pengaruh redaman yang sangat kecil, sehingga RAO heave mendekati nilai 1,0 m/m. Ini merupakan perilaku yang sesuai dengan benda terapung bebas pada gelombang sangat panjang.
Puncak resonansi yang sangat tajam terjadi pada frekuensi f = 0,04283 Hz (periode T ≈ 23,3 s), dengan nilai RAO mencapai 100,161 m/m. Nilai yang sangat besar ini secara fisik berarti bahwa silinder bergerak vertikal dengan amplitudo 100 kali amplitudo gelombang insiden. Nilai ini secara teoritis menunjukkan kondisi resonansi dengan redaman sangat kecil. Namun, dalam kondisi nyata, respons sebesar ini umumnya tidak tercapai karena efek non-linear, viscous damping, dan keterbatasan asumsi gelombang linier. Fenomena ini mengindikasikan bahwa rasio redaman sistem (ζ) sangat rendah:
RAOmax12, sehingga
12RAOmax=1/2(100)=0,005=0,5%
Nilai redaman yang sangat kecil ini menunjukkan bahwa hanya radiation damping yang berperan sebagai mekanisme disipasi energi, tanpa kontribusi signifikan dari efek viskositas fluida, sistem mooring, maupun perangkat peredam eksternal. Dalam praktik nyata, respons sebesar ini umumnya tidak tercapai karena efek non-linear dan viscous damping akan menjadi dominan sebelum amplitudo mencapai nilai tersebut.
Pada zona frekuensi tinggi (f > 0,10 Hz), nilai RAO heave menurun secara bertahap mendekati nol. Fenomena ini menunjukkan bahwa respons sistem memasuki zona inersia-dominan, di mana massa efektif sistem (massa struktur ditambah added mass) menjadi faktor yang mendominasi. Akibatnya, struktur tidak mampu merespons secara signifikan terhadap osilasi gelombang yang memiliki frekuensi tinggi.
Selain itu, pada frekuensi tinggi, panjang gelombang menjadi semakin kecil dan dapat sebanding atau lebih kecil dari dimensi karakteristik struktur. Dalam kondisi ini, mulai terjadi cancellation effect pada gaya eksitasi, khususnya gaya Froude-Krylov, akibat distribusi tekanan gelombang yang tidak lagi seragam di sepanjang permukaan benda. Hal ini menyebabkan resultan gaya eksitasi yang bekerja pada arah heave semakin kecil, sehingga respons struktur turut menurun.
Karena geometri silinder sepenuhnya simetris terhadap sumbu vertikal (circular cross-section), kurva RAO heave yang dihasilkan identik untuk seluruh arah gelombang yang dianalisis (0°, ±45°, ±90°, ±135°, ±180°). Hal ini merupakan konsekuensi langsung dari simetri azimuthal, di mana respons heave tidak bergantung pada arah datang gelombang.
5.3. Analisis RAO Pitch (Grafik)
RAO pitch (RY) menampilkan pola yang secara kualitatif serupa dengan heave namun dengan karakteristik yang berbeda secara kuantitatif. Puncak RAO pitch terjadi pada frekuensi f = 0,12356 Hz (periode T ≈ 8,1 s) dengan nilai 0,576 °/m. Frekuensi ini lebih tinggi dibandingkan frekuensi resonansi heave, yang menunjukkan bahwa sistem memiliki karakteristik dinamik rotasional yang berbeda akibat perbedaan antara kekakuan rotasional dan inersia rotasional. Secara umum, frekuensi natural pitch dapat dinyatakan sebagai:
pitch=C55Iyy+ARY RY
Nilai C₅₅ yang bernilai negatif (−177.744 N·m/m) menunjukkan bahwa silinder secara hidrostatik tidak stabil secara hidrostatik terhadap rotasi pitch. Hal ini konsisten dengan nilai metacentric height negatif (GMY = −5,40 m). yang menunjukkan bahwa setiap gangguan rotasi akan menghasilkan momen yang memperbesar deviasi, bukan mengembalikan sistem ke posisi setimbang. Secara teoritis, kondisi C55<0 menyebabkan frekuensi natural tidak terdefinisi secara real (bersifat imajiner), sehingga sistem tidak memiliki osilasi bebas yang stabil. Namun demikian, dalam analisis domain frekuensi menggunakan ANSYS AQWA, respons pitch tetap muncul sebagai respons terpaksa (forced response) akibat gaya eksitasi gelombang, bukan sebagai osilasi bebas sistem.
Besarnya momen inersia rotasional (Iyy= 8,08×107 kg·m²) serta kontribusi added mass rotasional menyebabkan amplitudo respons pitch tetap terbatas, meskipun sistem secara hidrostatik tidak stabil. Pengaruh arah gelombang terhadap RAO pitch sangat signifikan dan mengikuti pola teoritis. Arah gelombang head seas (0°) dan following seas (180°) menghasilkan respons pitch terbesar karena komponen gaya longitudinal gelombang bekerja maksimum terhadap sumbu rotasi pitch.
Sebaliknya, pada kondisi beam seas (90°), respons pitch menjadi sangat kecil (mendekati nol) akibat simetri geometri silinder terhadap arah eksitasi, sehingga tidak terbentuk momen rotasi yang signifikan. Dalam kondisi ini, eksitasi gelombang lebih dominan memicu gerakan heave dan roll dibandingkan pitch.
Sementara itu, pada kondisi quartering seas (±45° dan ±135°), nilai RAO pitch berada pada tingkat menengah. Hal ini disebabkan oleh komponen gaya longitudinal gelombang yang bekerja terhadap sumbu pitch hanya sebagian dari kondisi maksimum, sehingga respons yang dihasilkan secara geometris sebanding dengan proyeksi sudut datang gelombang, yaitu mendekati cos45°0,707 dari nilai maksimum pada kondisi head seas atau following seas.
Nilai RAO minimum pitch pada frekuensi sangat rendah (sekitar 0,0547°/m pada f ≈ 1,20 × 10⁻⁴ Hz) merepresentasikan kondisi quasi-static, di mana struktur mengikuti kemiringan permukaan gelombang secara pasif. Dalam kondisi ini, respons sudut pitch mendekati kemiringan gelombang (wave slope), sehingga amplitudo gerakan relatif kecil.
Setelah melewati frekuensi resonansi, nilai RAO pitch menurun secara bertahap. Hal ini menunjukkan bahwa pada frekuensi tinggi, inersia rotasional sistem menjadi dominan, sehingga struktur semakin sulit mengikuti perubahan sudut gelombang yang cepat. Akibatnya, amplitudo respons pitch menjadi semakin kecil seiring peningkatan frekuensi.
5.4. Analisis RAO Roll (Grafik)
RAO roll (RX) menunjukkan karakteristik yang sangat berbeda dari heave dan pitch, terutama dalam hal besaran respons dan sensitivitas terhadap arah gelombang. Pada arah gelombang 180° (following seas), nilai RAO roll sangat kecil — nilai maksimumnya hanya 3,23 × 10⁻⁴ °/m pada frekuensi 0,04283 Hz. Nilai yang sangat kecil ini bukan merupakan respons fisik yang signifikan, melainkan merupakan artefak numerik akibat ketidaksimetrisan kecil dari mesh (mesh asymmetry). Secara teoretis, pada arah gelombang 180°, eksitasi roll seharusnya bernilai nol sempurna karena silinder simetris terhadap bidang vertikal yang sejajar dengan arah perambatan gelombang.
Pada arah gelombang 90° (beam seas), RAO roll mencapai nilai maksimumnya. Kondisi ini secara fisik dapat dipahami karena pada beam seas, komponen gaya lateral gelombang bekerja secara penuh terhadap sumbu roll silinder, menghasilkan momen rolling yang paling besar. Arah 135° menghasilkan nilai RAO roll yang lebih kecil, proporsional dengan komponen lateral gaya eksitasi sebesar sin(135°) = 0,707 dari nilai maksimum beam seas.
Aspek kritis yang perlu ditekankan dalam analisis roll adalah nilai kekakuan roll hidrostatik C₄₄ = −177.744 N·m/° yang bernilai negatif. Nilai negatif ini secara fisik berarti bahwa silinder tidak memiliki stabilitas statik terhadap rolling — ketika dimiringkan sedikit dari posisi tegak, gaya hidrostatik justru mendorong silinder untuk terus miring lebih jauh (destabilizing moment), bukan mengembalikannya ke posisi semula. Kondisi ini dinyatakan secara kuantitatif melalui metacentric height negatif GMX = GMY = −5,40 m.
Implikasi operasional dari GM negatif ini sangat serius: tanpa sistem mooring atau ballast yang memadai, silinder dalam kondisi free-floating memiliki risiko tinggi mengalami capsizing (terbalik) ketika berhadapan dengan gelombang beam seas dengan amplitudo yang signifikan. Dalam konteks rekayasa kelautan, kondisi ini mutlak memerlukan perbaikan desain sebelum dioperasikan.
5.5. Analisis Radiation Damping (Grafik)
Koefisien radiation damping mencerminkan energi yang dilepaskan oleh benda bergerak ke medium fluida dalam bentuk gelombang yang diradiasikan keluar. Grafik radiation damping (Gambar 4.5) menampilkan tiga kurva: BZZ untuk heave, BRXRX untuk roll, dan BRYRY untuk pitch.
Radiation damping heave (BZZ) menunjukkan pola unik berbentuk kurva lonceng dengan puncak pada frekuensi sekitar 0,154 Hz (nilai B_ZZ,maks ≈ 14.999 N/(m/s)) dan kemudian menurun secara signifikan pada frekuensi tinggi. Penurunan radiation damping heave pada frekuensi tinggi dapat dijelaskan melalui teori radiasi gelombang: pada frekuensi tinggi, panjang gelombang yang diradiasikan menjadi sangat pendek, dan energi yang dapat dibawa oleh gelombang pendek tersebut semakin kecil. Pada frekuensi terendah (0,01592 Hz), nilai B_ZZ juga kecil karena gelombang yang diradiasikan sangat panjang dengan amplitudo kecil.
Radiation damping roll (BRXRX) dan pitch (BRYRY) menunjukkan profil yang identik satu sama lain — konsisten dengan kesimetrisan momen inersia Ixx = Iyy = 80.779.644 kg·m² yang identik. Kedua koefisien ini mencapai puncak pada frekuensi 0,277 Hz dengan nilai mendekati 99.400 N·m/(°/s), jauh lebih besar dibandingkan heave dalam satuan relatifnya. Nilai B_RR yang tinggi pada frekuensi menengah-tinggi mencerminkan bahwa gerak rotasi silinder menghasilkan gelombang radiasi yang lebih energetik, karena area wetted surface yang terlibat dalam gerak rotasi lebih besar secara efektif.
Dari perspektif desain, nilai radiation damping yang kecil pada rentang frekuensi resonansi heave (sekitar 0,043 Hz) mengkonfirmasi bahwa redaman alami sistem pada kondisi resonansi sangat rendah. Tanpa penambahan mekanisme disipasi eksternal seperti viscous damping lid, mooring damping, atau bilge keels, amplitudo resonansi heave akan tetap sangat besar dalam kondisi nyata.
5.6. Analisis Added Mass (Grafik)
Added mass merepresentasikan massa fluida ekivalen yang ikut terakselerasi bersama dengan benda bergerak. Grafik koefisien added mass (Gambar 4.6) menampilkan perilaku yang berbeda antara moda heave dan moda rotasional (roll/pitch).
Added mass heave (AZZ) menunjukkan perilaku monoton menurun dengan bertambahnya frekuensi, dari nilai sekitar 100.015 kg pada frekuensi rendah (f = 0,047 Hz) hingga menurun pada frekuensi tinggi. Fenomena penurunan added mass terhadap frekuensi ini merupakan perilaku standar dalam hidrodinamika offshore: pada frekuensi tinggi, panjang gelombang yang diradiasikan menjadi sangat pendek sehingga hanya lapisan fluida yang sangat tipis di sekitar benda yang ikut terakselerasi efektif. Sebaliknya, pada frekuensi rendah, fluida yang dipengaruhi oleh gerakan benda meluas hingga jarak yang lebih besar, sehingga massa ekivalen yang terakselerasi lebih besar. Rasio AZZ terhadap massa struktur (M = 4.164.793,67 kg) menunjukkan bahwa added mass heave merupakan fraksi kecil dari massa total, yang konsisten dengan geometri silinder berdiameter sedang.
Added mass roll dan pitch (ARXRX dan ARYRY) menunjukkan karakteristik yang sedikit berbeda: keduanya identik satu sama lain (karena Ixx = Iyy) dan mencapai nilai puncak pada frekuensi sekitar 0,189 Hz (nilai maks ≈ 104.660 kg·m²/° untuk roll dan 104.778 kg·m²/° untuk pitch). Fenomena puncak added mass rotasional ini terjadi karena pada rentang frekuensi tersebut, pola aliran fluida yang diinduks oleh gerak rotasi menghasilkan interferensi yang paling efektif dengan massa fluida sekitar, sehingga massa ekivalen rotasional mencapai maksimum. Setelah melewati frekuensi puncak, nilai added mass rotasional menurun secara bertahap mengikuti pola yang sama dengan added mass heave.
Dari perspektif perhitungan frekuensi natural, nilai added mass sangat berpengaruh terhadap posisi puncak resonansi. Penambahan added mass yang besar secara efektif mengurangi frekuensi natural sistem (memperpanjang periode natural), yang merupakan pertimbangan penting dalam desain struktur offshore untuk menghindari resonansi dengan periode gelombang operasional.
5.7. Analisis Gaya Froude-Krylov + Difraksi (Grafik)
Gaya eksitasi total yang bekerja pada silinder merupakan superposisi dari gaya Froude-Krylov (FK) dan gaya difraksi. Gaya FK adalah gaya yang disebabkan oleh tekanan gelombang insiden yang tidak terganggu (undisturbed incident wave pressure), sementara gaya difraksi merupakan gaya akibat scattering atau hamburan gelombang insiden oleh kehadiran benda. Grafik (Gambar 4.7) menampilkan gaya eksitasi total untuk heave (FZ), roll (MRX), dan pitch (MRY) pada arah gelombang 180°.
Gaya heave Froude-Krylov + difraksi (FZ) mencapai nilai tertinggi pada frekuensi terendah dalam rentang analisis (f = 0,01592 Hz, nilai FZ = 374.077,5 N/m) dan menurun secara monoton seiring meningkatnya frekuensi. Perilaku ini dapat dijelaskan melalui mekanisme fisik berikut: pada frekuensi rendah (gelombang panjang), distribusi tekanan di bawah permukaan silinder hampir seragam ke seluruh luas permukaan bawah silinder (A_wp = πR² = π × 3,5² ≈ 38,48 m²). Gaya netto vertikal yang dihasilkan sangat besar karena seluruh permukaan bawah mengalami tekanan yang hampir sama. Sebaliknya, pada frekuensi tinggi (gelombang pendek), variasi tekanan sepanjang diameter silinder menyebabkan cancellation effect: bagian permukaan bawah yang mengalami tekanan positif (puncak gelombang) dan bagian yang mengalami tekanan negatif (lembah gelombang) saling meniadakan, sehingga gaya netto menurun drastis. Efek cancellation ini semakin kuat ketika panjang gelombang menjadi lebih kecil dari atau sebanding dengan diameter silinder (λ ≤ D = 7 m), yang terjadi pada frekuensi sekitar f ≥ g/(πD) ≈ 0,45 Hz.
Momen pitch (MRY) menunjukkan pola yang lebih kompleks. Momen ini mencapai puncaknya pada frekuensi sekitar 0,235 Hz (nilai maks ≈ 2.281.085 N·m/m). Puncak momen pitch FK terjadi ketika setengah panjang gelombang (λ/2) menjadi sebanding dengan draft silinder (T = 5 m), yang menghasilkan perbedaan tekanan vertikal maksimum antara bagian atas dan bagian bawah badan silinder yang tercelup. Pada frekuensi rendah, distribusi tekanan hampir seragam sepanjang kolom silinder sehingga momen pitch kecil. Pada frekuensi sangat tinggi, efek cancellation kembali mendominasi.
Momen roll (MRX) pada arah gelombang 180° secara teoretis seharusnya nol untuk silinder yang sempurna simetris. Nilai yang ditampilkan dalam grafik (puncak sekitar 342,96 N·m/m pada f ≈ 0,197 Hz) merupakan efek numerik dari ketidaksimetrisan diskretisasi mesh. Nilai ini sangat kecil dibandingkan momen pitch dan dapat diabaikan dalam analisis praktis.
Secara keseluruhan, tren gaya FK + difraksi mengkonfirmasi bahwa silinder ini paling rentan terhadap eksitasi vertikal (heave) oleh gelombang panjang, yang relevan dengan kondisi operasi di perairan dalam di mana gelombang swell dapat memiliki periode sangat panjang.
5.8. Perbandingan Zero Speed vs. Forward Speed
Seluruh analisis dalam laporan ini dilakukan pada kondisi zero forward speed, yakni silinder dalam keadaan diam (tidak bergerak maju) di dalam domain fluida. Kondisi ini merepresentasikan skenario operasional di mana struktur beroperasi sebagai benda stasioner, misalnya spar platform yang ditambatkan atau buoy yang tertambat.
Pada kondisi forward speed (Fn > 0), terjadi modifikasi frekuensi efektif yang dialami oleh struktur akibat efek Doppler. Frekuensi yang relevan bukan lagi frekuensi gelombang absolut (ω) melainkan frekuensi encounter (ωₑ) yang dinyatakan sebagai:
ωₑ = ω − (ω²/g) · U · cos(μ)
dengan U adalah kecepatan maju kapal (m/s) dan μ adalah sudut antara arah gerak kapal dengan arah datang gelombang (μ = 0° untuk head seas, μ = 180° untuk following seas). Dalam konteks silinder vertikal ini, apabila diasumsikan kecepatan maju U = 2 knot ≈ 1,03 m/s:
- Untuk head seas (μ = 0°), arah perambatan gelombang berlawanan dengan arah gerak: ωₑ = ω + ω²U/g > ω, sehingga frekuensi encounter lebih tinggi dari frekuensi absolut. Hal ini berarti silinder akan merasakan gelombang dengan frekuensi lebih tinggi dibandingkan kondisi zero speed.
- Untuk following seas (μ = 180°), arah perambatan gelombang sama dengan arah gerak: ωₑ = ω − ω²U/g < ω, sehingga frekuensi encounter lebih rendah. Pada kondisi ekstrem (U ≈ Vg dimana Vg adalah kecepatan grup gelombang), silinder dapat ‘mengejar’ gelombang sehingga ωₑ mendekati nol — kondisi yang berpotensi sangat berbahaya.
Dampak perubahan frekuensi encounter terhadap RAO heave adalah pergeseran posisi puncak resonansi: pada head seas dengan forward speed, puncak resonansi bergeser ke arah frekuensi absolut yang lebih rendah (karena ωₑ = ωₙ pada ω lebih rendah), sementara pada following seas puncak bergeser ke frekuensi absolut yang lebih tinggi. Pergeseran ini pada dasarnya mengubah rentang frekuensi gelombang yang berbahaya bagi operasi struktur.
Selain efek encounter frequency, pada kondisi forward speed juga muncul fenomena tambahan berupa: (1) steady wave pattern (Kelvin wake) yang mengubah distribusi tekanan di sekitar benda; (2) efek memory (transient effects) pada koefisien added mass dan radiation damping yang perlu diperhitungkan; dan (3) coupling antara moda gerak akibat suku nonsimetris dalam matriks koefisien hidrodinamika. Semua efek ini secara keseluruhan akan memodifikasi kurva RAO, dan analisis forward speed yang lebih akurat memerlukan pendekatan strip theory atau tiga dimensi penuh dengan kecepatan maju.
Untuk studi lanjutan, disarankan untuk melakukan simulasi dengan variasi kecepatan maju (Fn = 0,05; 0,10; 0,15) menggunakan fitur seakeeping AQWA yang mendukung translational speed, sehingga dapat diidentifikasi rentang frekuensi encounter kritis yang harus dihindari selama operasi struktur.
Kedua, ketidakstabilan statik yang ditunjukkan oleh nilai metacentric height negatif
5.9. Implikasi Operasional dan Keamanan
Berdasarkan keseluruhan hasil analisis seakeeping yang telah diinterpretasikan dalam subbab-subbab sebelumnya, terdapat beberapa implikasi operasional dan keamanan yang perlu mendapatkan perhatian serius dalam desain dan operasi silinder vertikal terapung ini.
Pertama, resonansi heave pada frekuensi 0,04283 Hz (periode T ≈ 23,3 s) merupakan kondisi kritis yang harus dihindari selama operasi. Periode 23,3 detik berada di luar rentang gelombang angin tipikal (5–15 s) namun dapat terjadi pada kondisi swell lintas samudra yang mencapai periode 20–30 detik. Oleh karena itu, dalam perencanaan operasional, status gelombang swell harus dipantau secara cermat, dan jika periode swell mendekati 23 detik, maka operasi harus dihentikan atau struktur harus dipindahkan ke kondisi yang lebih aman.(GMX = GMY = −5,40 m) merupakan risiko keselamatan yang paling mendasar dan mendesak untuk diatasi. Nilai GM negatif berarti bahwa silinder dalam kondisi free-floating akan cenderung untuk terbalik (capsize) bahkan tanpa adanya gelombang, hanya dari gangguan kecil seperti beban angin atau arus laut. Solusi yang harus diterapkan mencakup:
1. Penambahan ballast di dasar silinder untuk menurunkan posisi center of gravity (CoG) secara signifikan. Sebagai acuan, nilai CoG perlu diturunkan setidaknya 5,40 m + safety margin (≥ 2 m) = 7,40 m ke bawah dari posisi saat ini untuk mencapai GM positif yang memadai.
2. Pemasangan sistem mooring yang tepat untuk memberikan kekakuan horizontal dan membantu mengembalikan silinder ke posisi tegak. Mooring juga akan menambahkan restoring moment positif terhadap gerakan roll dan pitch.
3. Evaluasi ulang distribusi massa internal silinder, termasuk posisi peralatan, pemberat, dan komponen struktural, untuk memastikan pusat massa berada serendah mungkin.
Ketiga, nilai RAO heave yang sangat besar pada resonansi (100,161 m/m) menunjukkan bahwa bahkan gelombang dengan amplitudo kecil (misalnya 0,1 m) dapat menyebabkan gerakan vertikal sekitar 10 m jika periodenya mendekati 23 detik. Amplitudo gerakan sebesar ini akan memberikan percepatan vertikal yang sangat besar, yang berpotensi merusak peralatan, mooring lines, risers, atau sistem perpipaan yang terhubung ke silinder. Dalam analisis fatigue dan ultimate limit state, kondisi resonansi heave ini harus diperhitungkan secara eksplisit sebagai pembebanan ekstrem.
Keempat, efek cancellation pada gaya heave FK + difraksi di frekuensi tinggi sebenarnya memberikan perlindungan alami terhadap eksitasi gelombang pendek. Ini berarti bahwa pada kondisi badai dengan gelombang tinggi namun frekuensi tinggi (periode < 5 s), gaya yang bekerja pada silinder justru relatif kecil, paradoks yang dikenal dalam rekayasa offshore sebagai ‘diffraction protection’. Namun demikian, kondisi ini tidak menghilangkan risiko yang berasal dari gelombang panjang berenergi tinggi.
Kelima, dalam konteks perbandingan dengan kapal konvensional, silinder vertikal free-floating ini memiliki karakteristik seakeeping yang sangat berbeda. Kapal konvensional dengan rasio L/B yang besar memiliki redaman roll yang jauh lebih besar (akibat bilge keels dan efek viskos), serta GM positif yang cukup besar untuk menjamin stabilitas. Silinder vertikal sebagai representasi spar platform atau buoy lebih mengandalkan inersia dan mooring untuk mempertahankan stabilitas, bukan pada bentuk lambung.
Keenam, untuk studi masa depan, analisis ini perlu diperluas mencakup: (a) simulasi nonlinier time-domain menggunakan AQWA-NAUT untuk mengevaluasi respons ekstrem; (b) analisis coupled mooring-hydrodynamics yang memodelkan sistem tambatan secara eksplisit; (c) ballasting study untuk mengoptimalkan distribusi massa; dan (d) validasi eksperimental menggunakan model fisik di fasilitas towing tank untuk memverifikasi dan mengkalibrasi hasil simulasi numerik.
I. Acknowledgments
BAB VI
PENUTUP
6.1. Kesimpulan
Berdasarkan hasil simulasi seakeeping menggunakan ANSYS AQWA terhadap silinder vertikal terapung, dapat ditarik beberapa kesimpulan utama.
Pertama, respons gerak struktur sangat dipengaruhi oleh frekuensi gelombang, dengan fenomena resonansi yang paling dominan terjadi pada moda heave. Nilai RAO heave mencapai puncak yang sangat tinggi pada frekuensi sekitar 0,04283 Hz, yang menunjukkan bahwa sistem memiliki redaman yang sangat kecil pada kondisi tersebut.
Kedua, dibandingkan dengan moda gerak lainnya, heave merupakan gerakan yang paling sensitif terhadap perubahan frekuensi gelombang. Sementara itu, respons pitch berada pada tingkat menengah dan roll relatif sangat kecil, terutama pada arah gelombang sejajar (180°), yang secara teoritis memang tidak menghasilkan momen roll signifikan.
Ketiga, arah datang gelombang berpengaruh terhadap moda gerak rotasional. Respons pitch terbesar terjadi pada arah 180° (following seas), sedangkan roll maksimum terjadi pada arah 90° (beam seas). Hal ini menunjukkan bahwa orientasi struktur terhadap gelombang menjadi faktor penting dalam analisis seakeeping.
Keempat, kondisi zero forward speed yang digunakan dalam simulasi menghasilkan respons yang murni dipengaruhi oleh frekuensi gelombang absolut. Jika struktur memiliki kecepatan maju, maka frekuensi encounter akan berubah dan berpotensi menggeser posisi resonansi, sehingga mempengaruhi tingkat respons yang terjadi.
Kelima, hasil analisis hidrostatik menunjukkan bahwa struktur dalam kondisi tidak stabil secara statik, ditandai dengan nilai metacentric height (GM) yang negatif. Kondisi ini mengindikasikan bahwa struktur berisiko mengalami capsizing apabila tidak dilakukan perbaikan desain, seperti penambahan ballast atau sistem mooring.
Secara keseluruhan, studi ini menunjukkan bahwa analisis numerik menggunakan ANSYS AQWA mampu memberikan gambaran yang cukup detail mengenai karakteristik hidrodinamika dan respons gerak struktur terapung terhadap gelombang.
6.2. Pertanyaan dan Jawaban
- What are the main characteristics of your assigned ship?
Objek yang dianalisis berupa silinder vertikal terapung dengan geometri simetris, tanpa sistem mooring, dan dianalisis dalam kondisi free-floating menggunakan pendekatan potential flow. - Which motion response is most sensitive to wave frequency?
Respons yang paling sensitif adalah heave, karena menunjukkan lonjakan RAO yang sangat besar pada frekuensi resonansi. - How does forward speed affect the RAO compared with zero speed?
Forward speed mengubah frekuensi yang dirasakan (encounter frequency), sehingga dapat menggeser posisi puncak RAO dan mengubah karakteristik respons struktur. - Which wave direction gives the largest heave response?
Semua arah gelombang memberikan respons heave yang sama karena geometri silinder simetris terhadap sumbu vertikal. - Which wave direction gives the largest pitch response?
Arah 180° (following seas) menghasilkan respons pitch terbesar. - Which wave direction gives the largest roll response?
Arah 90° (beam seas) menghasilkan respons roll terbesar. - At what frequency range does the strongest response occur?
Respons terkuat terjadi pada frekuensi sekitar 0,04–0,05 Hz, yang merupakan daerah resonansi sistem. - How do the results relate to the hull form and ship size?
Geometri silinder yang simetris menyebabkan respons translasi (heave) lebih dominan dibandingkan rotasi, serta menghasilkan respons yang tidak bergantung arah untuk heave. - What would you improve in a future study?
Studi selanjutnya dapat mencakup efek viskositas, penggunaan mooring system, serta analisis time-domain untuk mendapatkan hasil yang lebih realistis.
6.3. Saran
Untuk pengembangan penelitian selanjutnya, beberapa hal yang dapat dilakukan antara lain:
- Menambahkan sistem mooring agar kondisi struktur lebih realistis dan stabil.
- Memasukkan efek viskositas fluida yang tidak diperhitungkan dalam pendekatan potential flow.
- Melakukan analisis non-linear atau time-domain untuk menangkap respons ekstrem.
- Mengkaji variasi kecepatan maju (forward speed) untuk melihat perubahan encounter frequency secara lebih detail.
- Melakukan validasi dengan data eksperimen atau literatur untuk meningkatkan keandalan hasil simulasi.
DAFTAR PUSTAKA
ANSYS Inc. (2026). ANSYS AQWA Reference Manual Release 2026 R1. Canonsburg, PA.
Chakrabarti, S. K. (1987). Hydrodynamics of Offshore Structures. Southampton: Computational Mechanics Publications.
Faltinsen, O. M. (1990). Sea Loads on Ships and Offshore Structures. Cambridge: Cambridge University Press.
Journée, J. M. J., & Massie, W. W. (2001). Offshore Hydromechanics. Delft: Delft University of Technology.
Newman, J. N. (1977). Marine Hydrodynamics. Cambridge, MA: MIT Press.
Sarpkaya, T., & Isaacson, M. (1981). Mechanics of Wave Forces on Offshore Structures. New York: Van Nostrand Reinhold.
MacCamy, R. C., & Fuchs, R. A. (1954). Wave Forces on Piles: A Diffraction Theory. U.S. Army Corps of Engineers.
LAMPIRAN
Lampiran A – Tabel Spesifikasi Model ANSYS AQWA
| Parameter | Nilai | Satuan/Keterangan |
| Software | ANSYS AQWA 2026 R1 | – |
| Tipe Analisis | Hydrodynamic Diffraction & Radiation | – |
| Kedalaman Air | 1000 | m |
| Densitas Air Laut | 1025 | kg/m³ |
| Percepatan Gravitasi | 9,80665 | m/s² |
| Jumlah Elemen Mesh | 270 | elemen |
| Jumlah Node | 272 | node |
| Ukuran Elemen | 1,32592 | m |
| Frekuensi Maksimum | 0,39653 | Hz |
| Rentang Arah Gelombang | -180° s/d 180° | interval 45° |
| Jumlah Frekuensi | 100 | titik |
Lampiran B – Tabel Sampel Data Frekuensi
| No | Frekuensi (Hz) | Panjang Gelombang (m) |
| 1 | 0,01592 | 5166,61 |
| 2 | 0,01976 | 3731,00 |
| 3 | 0,02360 | 2744,30 |
| 5 | 0,03129 | 1592,58 |
| 8 | 0,04283 | 850,94 |
| 10 | 0,05052 | 611,61 |
| 15 | 0,06974 | 320,91 |
| 20 | 0,08896 | 197,21 |
| 25 | 0,10818 | 133,36 |
| 29 | 0,12356 | 102,23 |
| 50 | 0,20430 | 37,39 |
| 75 | 0,30041 | 17,29 |
| 100 | 0,39653 | 9,93 |