Disusun Oleh : Muhammad Wildan Nugroho
NPM : 2406360211
Dosen Pengampu : Prof. Dr. Ir. Ahmad Indra Siswantara
KARYA ILMIAH
ANALISIS SEAKEEPING KAPAL MENGGUNAKAN METODE NUMERIK DAN PENDEKATAN DAI5
BAB I
DASAR TEORI
1.1 Seakeeping Kapal
Seakeeping merupakan kajian dalam teknik perkapalan yang mempelajari respons dinamis kapal terhadap gelombang laut. Respons tersebut memengaruhi stabilitas, kenyamanan, dan keselamatan operasional kapal. Gerakan kapal sebenarnya terdiri dari enam derajat kebebasan (6 Degrees of Freedom), yaitu surge, sway, heave, roll, pitch, dan yaw. Namun, pada penelitian ini fokus utama diarahkan pada gerakan heave, pitch, dan roll karena ketiga gerakan tersebut paling berpengaruh terhadap performa kapal di laut.
Gerakan heave adalah gerakan vertikal kapal akibat pengaruh gelombang. Pitch merupakan gerakan rotasi kapal terhadap sumbu melintang, sedangkan roll adalah gerakan rotasi terhadap sumbu memanjang kapal. Ketiga gerakan ini sangat penting dianalisis karena dapat memengaruhi kenyamanan penumpang, efisiensi operasional, serta risiko kecelakaan kapal.
Secara matematis, gerakan kapal dapat dimodelkan sebagai sistem dinamis orde dua dengan persamaan:
Mx¨ + Cx˙ + Kx = F(t)
Persamaan tersebut menunjukkan bahwa respons kapal dipengaruhi oleh massa sistem, redaman, kekakuan hidrostatik, dan gaya eksitasi akibat gelombang laut. Massa sistem mencakup added mass yang muncul akibat interaksi fluida dan struktur kapal.
1.2 Teori Gelombang Laut
Gelombang laut merupakan sumber utama gaya eksitasi pada kapal. Dalam analisis teknik, gelombang sering disederhanakan menjadi gelombang sinusoidal reguler agar lebih mudah dimodelkan secara matematis.
Karakteristik gelombang meliputi tinggi gelombang, panjang gelombang, periode, dan frekuensi. Hubungan parameter tersebut dijelaskan melalui teori gelombang linear atau Airy Wave Theory. Teori ini mengasumsikan amplitudo gelombang relatif kecil dibandingkan panjang gelombang sehingga pendekatan linier masih dapat digunakan.
Dalam kondisi nyata, gelombang laut bersifat tidak teratur (irregular waves). Oleh karena itu, pada analisis lanjutan biasanya digunakan spektrum gelombang seperti Pierson-Moskowitz atau JONSWAP untuk mendekati kondisi laut sebenarnya.
1.3 Model Matematis Gerakan Kapal
Model matematis digunakan untuk menggambarkan perilaku dinamis kapal akibat gaya gelombang. Sistem gerakan kapal dipengaruhi oleh interaksi antara gaya pemulih, redaman, dan gaya luar.
Matriks massa pada sistem meliputi massa kapal dan added mass akibat fluida. Koefisien redaman menggambarkan hilangnya energi sistem akibat interaksi dengan air laut, sedangkan kekakuan hidrostatik berfungsi mengembalikan kapal menuju posisi seimbang.
Dalam analisis domain frekuensi, persamaan gerak kapal dapat digunakan untuk menentukan Response Amplitude Operator (RAO). Nilai RAO menunjukkan besarnya respons kapal terhadap amplitudo gelombang tertentu.
1.4 Metode Numerik
Metode numerik digunakan untuk menyelesaikan persamaan diferensial yang sulit diselesaikan secara analitik. Dalam analisis seakeeping, metode numerik sangat penting karena sistem yang dianalisis memiliki kompleksitas tinggi.
Beberapa metode numerik yang umum digunakan antara lain metode Euler, Runge-Kutta orde 4 (RK4), dan Finite Difference Method (FDM). Metode Euler memiliki konsep sederhana tetapi tingkat akurasinya rendah. Sebaliknya, metode RK4 memberikan hasil yang lebih akurat dan stabil sehingga sering digunakan pada simulasi dinamika kapal.
Persamaan umum metode RK4 dituliskan sebagai:
xn+1 = xn + 1/6 (k1 + 2k2 + 2k3 + k4)
Metode ini bekerja dengan menghitung gradien pada beberapa titik dalam satu iterasi sehingga solusi numerik menjadi lebih mendekati kondisi sebenarnya.
1.5 Pendekatan DAI5
Pendekatan DAI5 merupakan kerangka berpikir yang terdiri dari lima tahapan, yaitu Deep Awareness, Intention, Initial Thinking, Idealization, dan Implementation. Pendekatan ini membantu proses analisis teknik menjadi lebih terarah dan tidak hanya berfokus pada hasil numerik.
Deep Awareness menekankan pentingnya kesadaran terhadap dampak analisis teknik terhadap keselamatan manusia dan lingkungan. Intention berkaitan dengan tujuan analisis untuk menghasilkan desain kapal yang aman dan efisien.
Initial Thinking digunakan untuk mengidentifikasi permasalahan utama dan menyusunnya menjadi model matematis yang lebih sederhana. Tahap Idealization dilakukan dengan menyederhanakan sistem nyata melalui asumsi tertentu, seperti fluida ideal dan sistem linier.
Tahap terakhir adalah Implementation, yaitu penerapan metode numerik untuk memperoleh solusi dan melakukan analisis hasil simulasi.
BAB II
METODOLOGI PENELITIAN
2.1 Umum
Metodologi penelitian digunakan untuk menjelaskan tahapan analisis secara sistematis. Penelitian ini bertujuan menganalisis respons gerakan kapal terhadap gelombang laut menggunakan metode numerik dengan integrasi pendekatan DAI5.
Kajian seakeeping memiliki kompleksitas tinggi karena melibatkan interaksi antara fluida dan struktur kapal. Oleh karena itu, diperlukan pendekatan matematis dan numerik agar sistem dapat dianalisis secara lebih sederhana namun tetap merepresentasikan kondisi fisik sebenarnya.
2.2 Jenis Penelitian
Penelitian ini menggunakan pendekatan kuantitatif dengan metode simulasi numerik. Pendekatan kuantitatif dipilih karena analisis dilakukan menggunakan data numerik, persamaan matematis, dan proses komputasi.
Simulasi numerik digunakan untuk memprediksi respons kapal terhadap gelombang tanpa melakukan pengujian langsung di laut. Pendekatan ini lebih efisien dari segi biaya dan waktu.
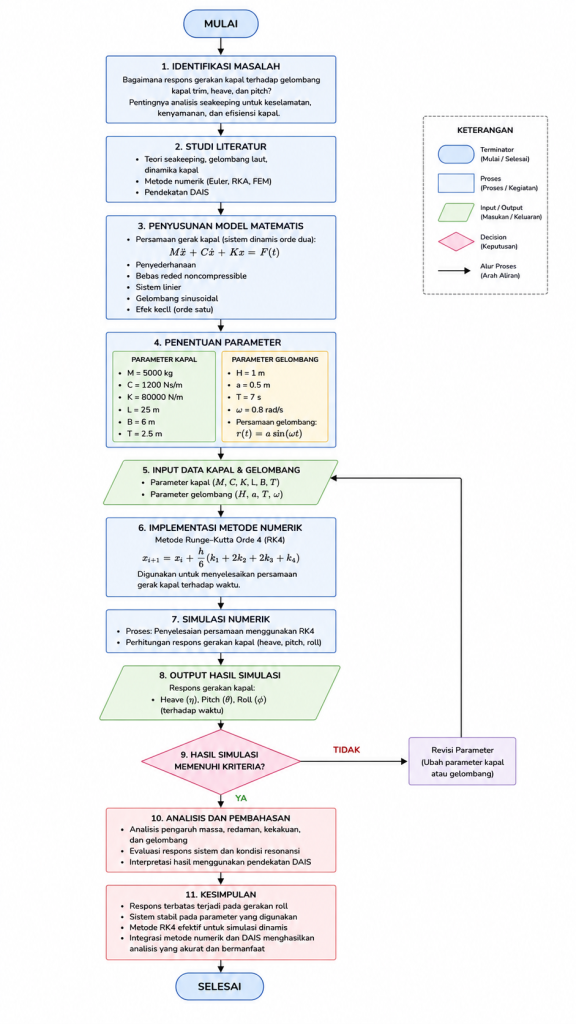
2.3 Tahapan Penelitian
Tahap pertama penelitian adalah identifikasi masalah terkait respons kapal terhadap gelombang laut. Permasalahan ini penting karena gerakan kapal yang berlebihan dapat memengaruhi keselamatan dan kenyamanan operasional.
Tahap berikutnya adalah studi literatur yang mencakup teori seakeeping, teori gelombang laut, metode numerik, dan pendekatan DAI5. Literatur diperoleh dari buku, jurnal ilmiah, dan referensi akademik lainnya.
Setelah itu dilakukan penyusunan model matematis gerakan kapal menggunakan persamaan dinamis orde dua. Model kemudian disederhanakan dengan beberapa asumsi seperti fluida ideal, sistem linier, dan gelombang sinusoidal.
Tahap selanjutnya adalah penentuan parameter kapal dan gelombang yang digunakan sebagai input simulasi. Simulasi dilakukan menggunakan metode Runge-Kutta orde 4 untuk memperoleh respons gerakan kapal terhadap waktu.
2.4 Parameter Penelitian
Parameter kapal yang digunakan meliputi massa kapal sebesar 5000 kg, koefisien redaman 1200 Ns/m, dan kekakuan hidrostatik 80000 N/m. Selain itu digunakan panjang kapal 25 m, lebar kapal 6 m, dan sarat kapal 2.5 m.
Gelombang laut dimodelkan sebagai gelombang sinusoidal reguler dengan tinggi gelombang 1 m, amplitudo 0.5 m, periode 7 detik, dan frekuensi 0.8 rad/s.
2.5 Asumsi Penelitian
Untuk mempermudah proses analisis, penelitian ini menggunakan beberapa asumsi. Fluida dianggap ideal dan incompressible, gelombang dianggap sinusoidal, gerakan kapal bersifat linier, serta pengaruh angin dan arus laut diabaikan.
Asumsi tersebut digunakan agar model matematis dapat diselesaikan secara numerik tanpa menghilangkan karakteristik utama sistem.
BAB III
HASIL DAN PEMBAHASAN
3.1 Hasil Simulasi Heave
Hasil simulasi menunjukkan bahwa amplitudo gerakan heave meningkat pada awal simulasi akibat pengaruh gaya eksitasi gelombang. Nilai maksimum heave terjadi pada detik ke-6 dengan amplitudo sekitar 0.314 m.
Setelah mencapai nilai maksimum, amplitudo mulai menurun akibat pengaruh redaman sistem. Hal ini menunjukkan bahwa koefisien redaman yang digunakan cukup efektif dalam mengurangi osilasi vertikal kapal.
Gerakan heave yang relatif kecil menunjukkan bahwa kapal masih berada dalam kondisi operasional yang aman pada parameter gelombang yang digunakan.
3.2 Hasil Simulasi Pitch
Gerakan pitch mengalami peningkatan bertahap hingga mencapai sudut maksimum sebesar 3.7°. Kondisi ini menunjukkan adanya transfer energi dari gelombang menuju sistem kapal.
Pitch yang besar dapat memengaruhi efisiensi propulsi karena posisi propeller menjadi kurang optimal. Selain itu, gerakan pitch berlebihan dapat meningkatkan risiko slamming pada bagian haluan kapal.
Penurunan amplitudo setelah beberapa waktu menunjukkan adanya dissipasi energi akibat redaman sistem.
3.3 Hasil Simulasi Roll
Hasil simulasi menunjukkan bahwa roll memiliki amplitudo terbesar dibandingkan gerakan lainnya. Nilai maksimum roll mencapai 5.8° pada detik ke-6.
Hal ini menunjukkan bahwa kapal lebih sensitif terhadap gerakan rotasi dibandingkan gerakan translasi vertikal. Dalam kondisi nyata, roll yang besar dapat menyebabkan ketidaknyamanan penumpang serta meningkatkan risiko perpindahan muatan.
Selain itu, amplitudo roll yang tinggi dapat meningkatkan kemungkinan capsizing apabila kapal menghadapi gelombang yang lebih ekstrem.
3.4 Analisis Pengaruh Parameter
Massa kapal memengaruhi frekuensi alami sistem. Semakin besar massa kapal, respons kapal cenderung menjadi lebih lambat tetapi lebih stabil.
Koefisien redaman berfungsi mengurangi amplitudo gerakan sistem. Pada simulasi ini, nilai redaman yang digunakan mampu mencegah terjadinya resonansi berlebihan.
Kekakuan hidrostatik berperan sebagai gaya pemulih yang menjaga kapal tetap berada pada posisi seimbang. Sementara itu, frekuensi gelombang sangat memengaruhi besar kecilnya respons sistem.
3.5 Pembahasan Berdasarkan DAI5
Pendekatan DAI5 membantu proses analisis menjadi lebih terarah dan bermakna. Deep Awareness memberikan kesadaran bahwa analisis seakeeping berkaitan langsung dengan keselamatan manusia dan keamanan kapal.
Intention menegaskan bahwa tujuan analisis bukan hanya memperoleh hasil numerik, tetapi juga mendukung desain kapal yang aman dan efisien.
Initial Thinking dan Idealization membantu menyederhanakan sistem nyata menjadi model matematis yang dapat dianalisis. Selanjutnya, tahap Implementation dilakukan melalui simulasi numerik menggunakan metode RK4.
Integrasi metode numerik dan DAI5 menghasilkan pendekatan analisis yang tidak hanya akurat secara teknis, tetapi juga mempertimbangkan aspek keselamatan dan tanggung jawab profesional.
BAB IV
KESIMPULAN
Berdasarkan hasil simulasi numerik, respons terbesar terjadi pada gerakan roll, sedangkan respons terkecil terjadi pada gerakan heave. Hal ini menunjukkan bahwa kapal lebih sensitif terhadap gerakan rotasi dibandingkan gerakan vertikal.
Metode Runge-Kutta orde 4 berhasil digunakan untuk menyelesaikan model matematis gerakan kapal dengan hasil yang stabil dan cukup akurat. Koefisien redaman dan kekakuan hidrostatik memberikan pengaruh penting dalam menjaga stabilitas sistem.
Pendekatan DAI5 membantu proses analisis menjadi lebih terstruktur karena tidak hanya berfokus pada hasil perhitungan, tetapi juga mempertimbangkan tujuan, keselamatan, dan dampak operasional kapal.
Dengan demikian, integrasi metode numerik dan pendekatan DAI5 dapat digunakan sebagai pendekatan yang efektif dalam analisis seakeeping kapal modern.
REFERENSI
Siswantara, A. I. (2025). Combining science and faith, UI professor introduces the “DAI5 CFD” concept in understanding ultimate reality. Fakultas Teknik Universitas Indonesia. https://eng.ui.ac.id/en/combining-science-and-faith-ui-professor-introduces-the-dai5-cfd-concept-in-understanding-ultimate-reality/
Siswantara, A. I. (2025, Maret 10). Guru besar FTUI padukan sains dan keimanan dengan konsep “DAI5 CFD”. ANTARA News Megapolitan. https://megapolitan.antaranews.com/berita/370561/guru-besar-ftui-padukan-sains-dan-keimanan-dengan-konsep-dai5-cfd
Siswantara, A. I. (2025, Maret 10). Integrasi sains dan keimanan: Guru Besar UI perkenalkan konsep ‘DAI5 CFD’. Merdeka.com. https://planet.merdeka.com/hot-news/integrasi-sains-dan-keimanan-guru-besar-ui-perkenalkan-konsep-dai5-cfd-340452-mvk.html
Ahmad Indra, D. (2023). DAI5 framework for conscious problem solving [Self-published work]. Departemen Teknik Mesin, Universitas Indonesia.