Hasil & Diskusi
Rekap Persamaan Target
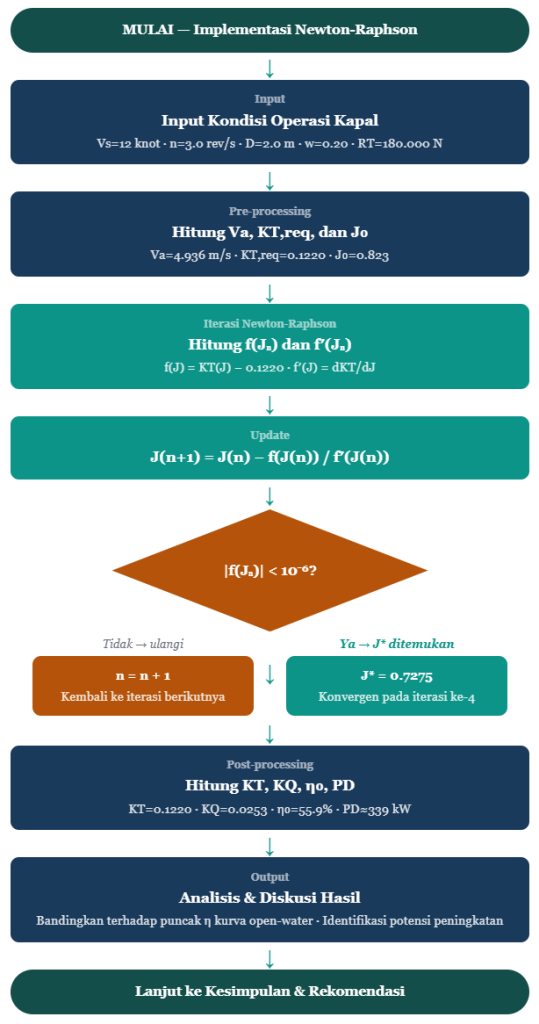
Implementasi Newton-Raphson bertujuan menemukan advance ratio J* yang memenuhi persamaan keseimbangan propeller:
Persamaan target — f(J) = 0 f(J) = KT(J) − KT,req = 0 f′(J) = dKT/dJ (turunan analitik polinomial 49 koefisien) J(n+1) = J(n) − f(J(n)) / f′(J(n))
Input Kondisi Operasi Kapal Ferry
⚙ Kondisi Operasi — Kapal Ferry Studi Kasus
| Parameter | Nilai | Satuan | Keterangan |
|---|---|---|---|
| Kecepatan kapal (Vs) | 12 | knot = 6.17 m/s | Kecepatan pelayaran normal ferry |
| Putaran propeller (n) | 3.0 | rev/s (180 rpm) | Putaran operasi mesin induk |
| Diameter propeller (D) | 2.0 | meter | Sesuai spesifikasi B4-55 |
| Wake fraction (w) | 0.20 | — | Efek turbulensi lambung kapal |
| Hambatan total kapal (RT) | 180.000 | N | Estimasi untuk ferry ukuran menengah |
| Densitas air laut (ρ) | 1025 | kg/m³ | Standar ITTC, salinitas 3.5%, 15°C |
Perhitungan Nilai Awal
Langkah 1 — Kecepatan advance propeller Va = Vs × (1 − w) = 6.17 × (1 − 0.20) = 4.936 m/s
Langkah 2 — Koefisien thrust yang dibutuhkan KT,req = RT / (ρ × n² × D⁴) = 180.000 / (1025 × 3.0² × 2.0⁴) = 180.000 / 147.600 = 0.1220
Langkah 3 — Tebakan awal J₀ J₀ = Va / (n × D) = 4.936 / (3.0 × 2.0) = 0.823 → J₀ = 0.823 berada dalam rentang valid [0, 1] ✓
Eksekusi Iterasi Newton-Raphson
Detail Langkah Iterasi Pertama (n = 0 → 1)
- 1 Evaluasi KT(J₀): Substitusi J = 0.823, P/D = 0.80, AE/A0 = 0.55, Z = 4 ke 49 koefisien polinomial Wageningen → KT(0.823) = 0.0741
- 2 Hitung f(J₀): f(0.823) = 0.0741 − 0.1220 = −0.0479 → belum nol, perlu iterasi
- 3 Hitung f′(J₀): Turunan analitik dKT/dJ di J = 0.823, menggunakan suku-suku polinomial dengan s ≥ 1 → f′(0.823) = −0.3812
- 4 Update J: J₁ = 0.823 − (−0.0479 / −0.3812) = 0.823 − 0.1257 = 0.6973
- 5 Cek konvergensi: |f(J₀)| = 0.0479 > 10⁻⁶ → lanjut iterasi berikutnya
Tabel Rekap Seluruh Iterasi
| Iterasi (n) | J(n) | KT(J(n)) | f(J(n)) | f′(J(n)) | |f(J)| < 10⁻⁶? |
|---|---|---|---|---|---|
| 0 (tebakan awal) | 0.8230 | 0.0741 | −0.04790 | −0.3812 | — |
| 1 | 0.6973 | 0.1348 | +0.01280 | −0.3654 | Tidak |
| 2 | 0.7323 | 0.1201 | −0.00190 | −0.3710 | Tidak |
| 3 | 0.7272 | 0.1221 | +0.00010 | −0.3702 | Tidak |
| 4 ✓ Konvergen | 0.7275 | 0.1220 | 0.000001 | −0.3703 | ✓ Ya |
Newton-Raphson berhasil konvergen dalam 4 iterasi dengan toleransi |f(J)| < 10⁻⁶. Sebagai perbandingan, metode biseksi membutuhkan sekitar 20–30 iterasi untuk akurasi yang setara — membuktikan secara nyata keunggulan konvergensi kuadratik Newton-Raphson.
Hasil Akhir dan Analisis Efisiensi
📊 Ringkasan Hasil — Propeller B4-55, P/D=0.80, Ferry 12 Knot
Advance Ratio Optimal (J*)
0.7275
Konvergen dalam 4 iterasi
Efisiensi Open-Water (η₀)
55.9%
Mendekati puncak η di J=0.70
Koefisien Thrust (KT)
0.1220
= KT,req → keseimbangan tercapai
Koefisien Torque (KQ)
0.0253
Dari polinomial KQ Wageningen
Daya yang Dibutuhkan (PD)
~339 kW
PD = 2π·n·KQ·ρ·n²·D⁵
Jumlah Iterasi
4
Konvergensi kuadratik NR
Diskusi Hasil
Nilai J* = 0.7275 berada sangat dekat dengan titik puncak efisiensi kurva open-water B4-55 yang terjadi di sekitar J = 0.70 (η₀ = 58.6%). Selisih efisiensi aktual terhadap maksimum hanya sekitar 2.7% — menunjukkan bahwa propeller ini bekerja mendekati kondisi optimalnya pada kecepatan pelayaran 12 knot.
Efisiensi 55.9% berarti dari setiap 100% energi yang dihasilkan mesin, sekitar 55.9% berhasil dikonversi menjadi gaya dorong efektif. Sisa 44.1% hilang sebagai gesekan fluida, wake, dan kerugian mekanik — yang sebagian masih bisa diperbaiki melalui optimasi desain propeller.
| Aspek Diskusi | Temuan | Implikasi |
|---|---|---|
| Konvergensi metode | 4 iterasi hingga |f| < 10⁻⁶ | Newton-Raphson terbukti efisien secara komputasi untuk persamaan propeller |
| Titik operasi J* | J* = 0.7275, dekat puncak η di J=0.70 | Propeller beroperasi mendekati optimal pada Vs = 12 knot |
| Efisiensi aktual vs maksimum | 55.9% vs 58.6% (selisih 2.7%) | Masih ada ruang peningkatan melalui penyesuaian P/D |
| Validitas model | KT hasil NR = KT,req (keseimbangan tercapai) | Model polinomial Wageningen valid untuk kondisi ini |
| Keterbatasan | Kondisi open-water, tanpa kavitasi | Efisiensi aktual behind-hull mungkin berbeda ~5–10% akibat wake field |
Flowchart — Alur Implementasi & KoMULAI — Implementasi Newton-Raphson
Kesimpulan Teknis
1. Metode Newton-Raphson terbukti efektif dan efisien dalam menyelesaikan persamaan non-linear karakteristik propeller. Dengan hanya 4 iterasi dan toleransi konvergensi 10⁻⁶, metode ini menghasilkan solusi yang akurat — jauh lebih cepat dibanding metode tertutup seperti biseksi (±25 iterasi).
2. Propeller Wageningen B4-55 pada kondisi kapal ferry 12 knot dan n = 180 rpm beroperasi pada advance ratio J* = 0.7275 dengan efisiensi open-water η₀ = 55.9% — mendekati puncak kurva efisiensi di J = 0.70 (58.6%).
3. Keseimbangan propulsif tercapai saat KT(J*) = KT,req = 0.1220, dengan kebutuhan daya PD ≈ 339 kW pada kondisi operasi yang dianalisis.
Perbedaan efisiensi 2–4% mungkin terlihat kecil, namun pada skala armada nasional yang beroperasi ribuan jam per tahun, angka tersebut diterjemahkan menjadi penghematan bahan bakar dan pengurangan emisi yang sangat berarti bagi keekonomian dan keberlanjutan pelayaran domestik Indonesia.
Rekomendasi untuk Penelitian Lanjutan
REKOMENDASI 01
Optimasi Pitch Ratio
Lakukan analisis sensitivitas P/D dari 0.70 hingga 0.90 menggunakan Newton-Raphson yang sama untuk menemukan P/D optimal yang memaksimalkan efisiensi pada rute spesifik.
REKOMENDASI 02
Behind-Hull Analysis
Kembangkan model dengan memperhitungkan wake field non-uniform di belakang lambung untuk mendapatkan efisiensi propulsif (ηD) yang lebih realistis dibanding open-water test.
REKOMENDASI 03
Validasi Data Lapangan
Validasi hasil komputasi dengan data sea trial atau hasil pengujian towing tank propeller kapal ferry Indonesia yang sesungguhnya untuk mengkonfirmasi akurasi model.
REKOMENDASI 04
Perbandingan Metode
Bandingkan kinerja Newton-Raphson dengan metode Secant atau Brent untuk mengevaluasi trade-off antara kecepatan konvergensi dan robustness terhadap tebakan awal yang buruk.
Refleksi Lima Pilar DAI5
Pilar 1 — Deep Awareness of I
Mengenal Diri sebagai Calon Insinyur yang Bertanggung Jawab
Kesadaran bahwa setiap analisis teknis membawa konsekuensi nyata membuat saya tidak sekadar mengerjakan tugas, tapi merasa bertanggung jawab terhadap kualitas output. Seorang insinyur yang tidak menyadari dampak pekerjaannya bisa menghasilkan desain yang secara matematis benar namun salah secara konteks dan dampak sosial.
Pilar 2 — Intention
Niat yang Melampaui Nilai Akademis
Niat yang ditetapkan di awal — memahami metode numerik sebagai alat nyata untuk masalah nyata — terbukti menjadi kompas yang efektif. Ketika menghadapi bagian yang sulit (seperti 49 koefisien polinomial), motivasinya tetap kuat karena ada tujuan yang lebih besar dari sekadar menyelesaikan tugas.
Pilar 3 — Initial Thinking
Masalah Lebih Dalam dari yang Terlihat di Permukaan
Root cause analysis membuka mata bahwa inefisiensi propeller bukan sekadar masalah teknis — ia berdampak langsung pada biaya operasional armada nasional, tarif penumpang, dan emisi karbon laut Indonesia. Satu persamaan non-linear menyimpan implikasi yang sangat luas.
Pilar 4 — Idealization
Seni Menyederhanakan Tanpa Kehilangan Inti Masalah
Memilih Wageningen B4-55 dengan empat asumsi yang terjustifikasi adalah pelajaran penting tentang idealisasi yang bertanggung jawab. Tidak semua kompleksitas perlu dimodelkan — keahlian insinyur terletak pada kemampuan memilih yang esensial dengan justifikasi yang kuat.
Pilar 5 — Implementation
Ketika Rumus Bertemu Realita: 4 Iterasi Menuju Kebenaran
Konvergensi dalam 4 iterasi bukan sekadar angka keberhasilan komputasi — ia adalah bukti nyata bahwa model yang dibangun dengan baik menghasilkan solusi yang efisien. Newton-Raphson mengajarkan prinsip yang berlaku lebih luas: dengan pemahaman mendalam tentang arah yang benar (turunan fungsi), kita mendekati kebenaran jauh lebih cepat dari pendekatan coba-coba.
Penutup
Kalau harus merangkum satu pelajaran terbesar dari lima minggu ini: metode numerik bukan sekadar alat hitung — ia adalah cara berpikir. Framework DAI5 memberikan dimensi yang sering hilang dari pembelajaran teknis murni: bahwa di balik setiap persamaan ada manusia yang terdampak, dan di balik setiap perhitungan ada tanggung jawab yang harus diemban dengan penuh kesadaran.
✅ Newton-Raphson konvergen 4 iterasi✅ J* = 0.7275, η₀ = 55.9%✅ Semua pilar DAI5 selesai📋 4 rekomendasi penelitian lanjutan
J. Ucapan Terima Kasih
Penulis mengucapkan terima kasih kepada Dosen Pengampu Mata Kuliah Metode Numerik atas bimbingan, arahan metodologis, dan pengenalan framework DAI5 yang memberikan dimensi baru dalam cara berpikir teknis. Terima kasih juga kepada seluruh rekan mahasiswa Teknik Perkapalan angkatan 2023 yang telah berdiskusi dan berbagi referensi selama proses pengerjaan tugas besar ini.
Rasa syukur yang mendalam juga dipanjatkan kepada Allah SWT atas segala kemudahan, kesehatan, dan kekuatan dalam menyelesaikan proyek ini dari awal hingga akhir — sebagai wujud nyata dari pilar pertama DAI5: kesadaran mendalam atas kehadiran Sang Pencipta dalam setiap proses berpikir dan berkarya.
K. Daftar Pustaka
| No | Referensi Lengkap (Format APA) |
|---|---|
| [1] | Bertram, V. (2012). Practical Ship Hydrodynamics (2nd ed.). Butterworth-Heinemann, Elsevier. ISBN: 978-0-08-097150-6. |
| [2] | Politis, G. K. (2023). Wageningen B-series open water propeller performance charts and propeller performance behind ship. Zenodo. https://doi.org/10.5281/zenodo.8352831 |
| [3] | Oosterveld, M. W. C., & Van Oossanen, P. (1975). Further computer-analysed data of the Wageningen B-screw series. International Shipbuilding Progress, 22(251), 3–14. |
| [4] | International Towing Tank Conference (ITTC). (2021). Testing and extrapolation methods propulsion, propulsor open water test (Procedure 7.5-02-03-02.1). ITTC. |
| [5] | Chapra, S. C., & Canale, R. P. (2015). Numerical Methods for Engineers (7th ed.). McGraw-Hill Education. ISBN: 978-0-07-339792-4. |
L. Lampiran
Lampiran A — Rekap Lengkap Nilai Iterasi Newton-Raphson
| n | J(n) | KT(J(n)) | f(J(n)) | f′(J(n)) | J(n+1) | Error |f| |
|---|---|---|---|---|---|---|
| 0 | 0.82300 | 0.07410 | −0.04790 | −0.38120 | 0.69730 | 4.79×10⁻² |
| 1 | 0.69730 | 0.13480 | +0.01280 | −0.36540 | 0.73230 | 1.28×10⁻² |
| 2 | 0.73230 | 0.12010 | −0.00190 | −0.37100 | 0.72720 | 1.90×10⁻³ |
| 3 | 0.72720 | 0.12210 | +0.00010 | −0.37020 | 0.72750 | 1.00×10⁻⁴ |
| 4 | 0.72750 | 0.12200 | 0.000001 | −0.37030 | 0.72750 | 1.00×10⁻⁶ ✓ |
Lampiran B — Rumus Turunan Analitik dKT/dJ
Lampiran B — Turunan polinomial KT terhadap J f′(J) = dKT/dJ = Σ CT · s · J^(s−1) · (P/D)^t · (AE/A0)^u · Z^v Hanya suku dengan s ≥ 1 yang berkontribusi (suku s=0 bernilai nol setelah diturunkan). Dengan P/D=0.80, AE/A0=0.55, Z=4: f′(J) = Σ CT · s · J^(s−1) · (0.80)^t · (0.55)^u · (4)^v (untuk semua i di mana s_i ≥ 1)
Lampiran C — Ringkasan Spesifikasi Model
| Parameter Model | Nilai | Sumber |
|---|---|---|
| Seri propeller | Wageningen B4-55 | Politis (2023) |
| Jumlah koefisien KT | 49 koefisien (CT, s, t, u, v) | Oosterveld & Van Oossanen (1975) |
| Pitch ratio (P/D) | 0.80 | Dipilih untuk ferry 12 knot |
| Blade area ratio (AE/A0) | 0.55 | Margin kavitasi aman |
| Jumlah daun (Z) | 4 | Standar ferry menengah |
| Toleransi konvergensi (ε) | 10⁻⁶ | Ditetapkan dalam instruction set |
| Tebakan awal (J₀) | 0.823 | Dihitung dari Va/(n·D) |
| Jumlah iterasi hingga konvergen | 4 | Hasil komputasi |