A. Project Title
Analisis Sistem dan kekuatan cekam dari Robotic Arm pada robot selam berbasis DAI5 Framework
B. Author Complete Name
Reza Juniawan
C. Affiliation
Departemen Teknik Mesin, Universitas Indonesia
D. Abstract
Dalam era Revolusi Industri 4.0, integrasi dunia fisik dan digital melalui sistem Cyber Physical Production System (CPPS) telah mendorong kemajuan pesat dalam teknologi robotika, termasuk pengembangan robotic arm. Seiring meningkatnya kebutuhan eksplorasi bawah laut, Remotely Operated Vehicle (ROV) menjadi salah satu platform penting dalam mendukung studi kelautan. ROV dilengkapi dengan robotic arm yang berperan vital dalam berbagai tugas manipulasi di lingkungan ekstrem. Studi ini berfokus pada analisis sistem robotic arm yang dipasang pada ROV, dengan penekanan terhadap penentuan kekuatan struktur dan pemilihan material yang sesuai. Sistem robotic arm dirancang dengan mempertimbangkan jumlah derajat kebebasan (DOF), kapasitas beban, serta ketahanan terhadap tekanan bawah laut. Referensi terkait rancang bangun robotik di sektor industri menunjukkan pentingnya akurasi gerakan dan pengendalian berbasis sekuensial kontrol menggunakan PLC. Sementara itu, dalam konteks kelautan, karakteristik fisik ROV seperti ukuran, bobot, dan klasifikasinya (misalnya General ROV) sangat menentukan desain dan spesifikasi robotic arm yang dapat dipasang. Dengan pendekatan ini, analisis yang mendalam terhadap kekuatan mekanis dan pemilihan material tahan korosi menjadi kunci untuk memastikan performa optimal robotic arm dalam operasi bawah laut.
E. Author Declaration
1. Deep Awareness (of) I
Dalam menganalisis dan merancang sistem robotic arm pada ROV, saya menyadari bahwa akal dan ilmu yang saya gunakan adalah anugerah dari Yang Maha Esa. Setiap perhitungan kekuatan, pemilihan material, dan desain struktur menjadi pengingat akan keterbatasan manusia di hadapan kesempurnaan ciptaan-Nya. Proyek ini bukan sekadar pengembangan teknologi, tetapi juga bentuk kesadaran bahwa semua upaya ini harus diarahkan untuk menumbuhkan rasa syukur, tanggung jawab, dan pengabdian kepada-Nya.
2. Intention of the Project Activity
Proyek ini bertujuan untuk menganalisis dan mengembangkan sistem robotic arm pada ROV dengan fokus pada kekuatan struktur, pemilihan material optimal, dan efisiensi gerak di lingkungan bawah laut. Untuk mencapai tujuan ini, metode numerik digunakan sebagai alat bantu utama dalam mensimulasikan beban, tekanan, serta performa mekanis robotic arm sebelum proses manufaktur dilakukan. Pendekatan numerik ini memungkinkan analisis yang lebih akurat dan efisien, mengurangi kebutuhan uji coba fisik berulang yang memakan waktu dan biaya. Seluruh kegiatan ini dilandasi oleh niat untuk menghadirkan inovasi teknologi yang tidak hanya efektif secara teknis, tetapi juga memperhatikan keberlanjutan, keselamatan, dan integritas ilmiah.
F. Introduction
Robotic arm pada Remotely Operated Vehicle (ROV) memiliki peran penting sebagai alat utama untuk mengambil, memindahkan, dan memanipulasi objek di dasar laut yang sulit diakses manusia. Dalam lingkungan laut dalam, tekanan ekstrem, suhu rendah, dan minim pencahayaan menjadi tantangan besar yang tidak dapat diatasi hanya dengan kemampuan manusia. Karena itu, keberadaan robotic arm yang kuat, presisi, dan tahan korosi menjadi kunci dalam mendukung keberhasilan operasi ROV. Untuk memastikan kinerja optimal, perlu dilakukan analisis mendalam terkait kekuatan struktur dan pemilihan material yang sesuai dengan kondisi lingkungan. Penerapan metode numerik menjadi sangat penting dalam tahap perancangan untuk menghitung beban kerja, menganalisis gaya, dan mengoptimalkan efisiensi gerakan robotic arm sebelum implementasi di lapangan. Dengan demikian, proyek ini diarahkan untuk menghasilkan robotic arm yang tidak hanya berfungsi efektif, tetapi juga andal dalam menunjang eksplorasi laut dalam secara aman dan efisien.


3. Initial Thinking
Dalam era industri modern, kebutuhan untuk meningkatkan efisiensi dan keselamatan kerja semakin mendesak, khususnya pada proses-proses repetitif, berat, dan presisi tinggi di sektor manufaktur dan layanan. Salah satu teknologi yang berkembang untuk memenuhi kebutuhan ini adalah robotic arm. Berbagai penelitian menunjukkan bahwa penggunaan robotic arm mampu menggantikan kerja manusia dalam tugas-tugas yang monoton atau berisiko tinggi, sekaligus meningkatkan produktivitas dan kualitas output.
Penelitian sebelumnya, seperti pengembangan AtwoR Robot oleh Andrian dkk. (2020), menunjukkan bahwa robotic arm berbasis Arduino dan motor servo MG995 mampu mengotomatiskan proses pemindahan barang dengan kecepatan dan ketepatan tertentu. Demikian pula, dalam penelitian Hajah dan Nur (2023), penggunaan robotic arm dengan kontrol sekuensial berbasis PLC berhasil memindahkan beban hingga 1 kg dengan akurasi yang cukup baik.
Meskipun begitu, beberapa kesenjangan masih ada, yaitu:
- Ketepatan posisi robotic arm masih menunjukkan error hingga 15%, yang bisa mengganggu keandalan dalam aplikasi industri berskala besar.
- Durabilitas dan kapasitas beban dari motor servo standar seperti MG995 masih terbatas untuk aplikasi berat atau lingkungan kerja ekstrem.
- Respons terhadap variasi objek (berat, warna, ukuran) masih bergantung pada sensor sederhana dan belum sepenuhnya adaptif.
Kesenjangan-kesenjangan ini memotivasi perlunya penelitian dan pengembangan lebih lanjut pada sistem robotic arm, khususnya:
- Meningkatkan akurasi kontrol posisi dengan metode kontrol yang lebih presisi (misalnya kontrol berbasis model kinematika atau AI).
- Mengoptimalkan desain mekanik untuk meningkatkan kapasitas beban tanpa mengorbankan kecepatan atau akurasi.
- Mengintegrasikan sistem sensorik cerdas untuk memungkinkan robotic arm beradaptasi terhadap variasi objek dan lingkungan secara real-time.
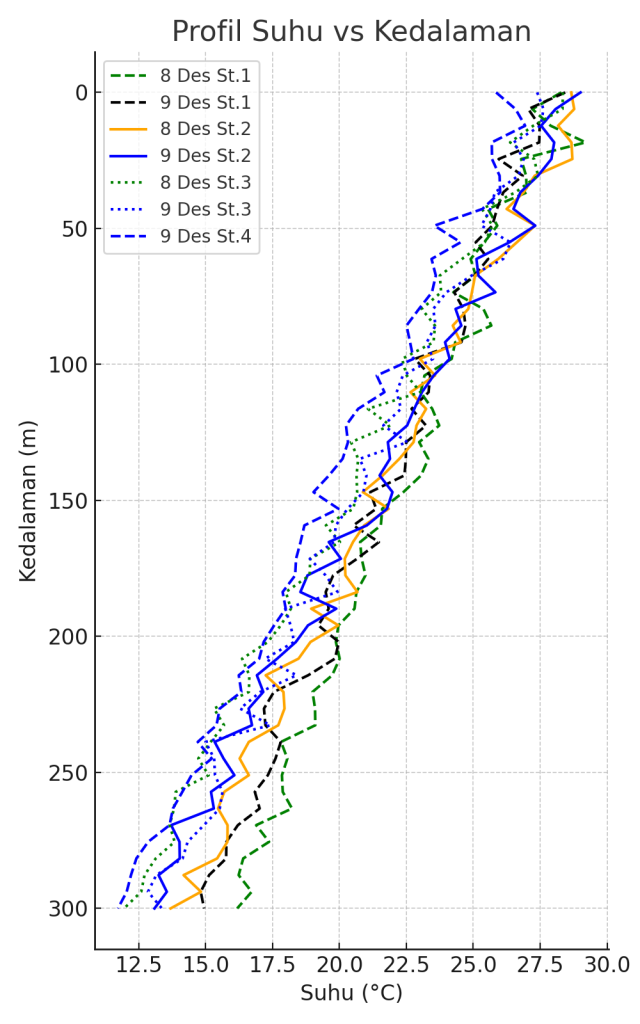
grafik di atas diperoleh dari perbandingan suhu pada lautan indonesia dengan kedalamnya.
G. Metode & Prosedur
4. Idealization
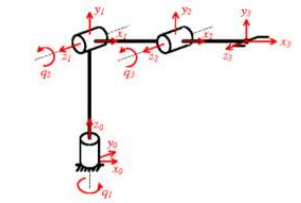
- Menganalisis struktur dasar robotic arm empat derajat kebebasan (4 DOF): base, shoulder, elbow, dan gripper.
- Mengkaji karakteristik material: plat besi 10 mm sebagai material struktur utama.
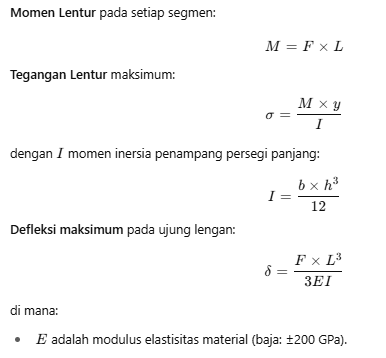
- Studi tentang analisis gaya, torsi, dan momen lentur pada sistem batang berengsel.
Perancangan Struktur Mekanik
- Pemilihan material:
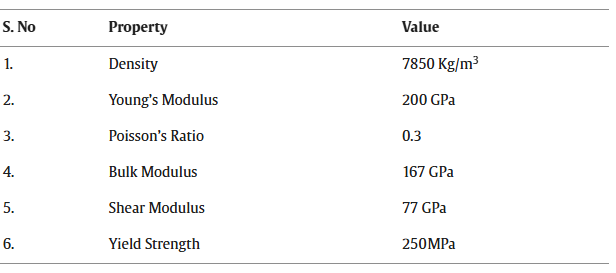
- Material utama: plat baja ringan tebal 10 mm (dengan yield strength sekitar 250 MPa).
- Desain Dimensi:
- Panjang segmen:
- Base ke shoulder: 10 cm
- Shoulder ke elbow: 20 cm
- Elbow ke gripper: 20 cm
- Panjang segmen:
- Kebutuhan Torsi dihitung untuk setiap joint:
- Menggunakan rumus:
Prototyping
- Pembuatan struktur dengan fabrikasi manual (pengelasan, pemotongan, pengeboran).
- Perakitan sambungan:
- Setiap joint menggunakan bearing sederhana untuk mengurangi gesekan.
- Mounting motor servo dilakukan dengan rumah aluminium agar lebih stabil.
Asumsi:
- Gaya gesek di joint diabaikan (menggunakan bearing/lubrikasi yang baik).
- Struktur lengan dianggap batang kaku tanpa elastisitas longitudinal.
- Beban dianggap terpusat pada gripper.
- Gerakan dilakukan dalam kecepatan lambat, sehingga efek dinamis (seperti getaran dan inersia) diabaikan.
Model:
- Model statik: Semua analisis gaya dan momen menggunakan statika (bukan dinamis).
- Model batang bersendi: Setiap segmen modelkan sebagai batang bebas gaya dengan reaksi di tiap joint.
Penyederhanaan:
- Sambungan dianggap ideal tanpa backlash (main bebas).
- Distribusi massa segmen disimplifikasi sebagai massa terkonsentrasi di tengah-tengah segmen.
- Motor servo dianggap sebagai penghasil torsi ideal sesuai spesifikasi katalog, tanpa degradasi performa akibat panas atau keausan.
5. Instruction Set
bagian dari robotic arm salah satunya gripper untuk mencekam sebuah benda mati atau hidup, maka kita coba lakukan dari semua langkah langkah di atas.
Buat model CAD untuk setiap bagian robotic arm:
- Base, shoulder, elbow, gripper.
- Pertimbangkan ergonomi dan kestabilan.
- Tentukan panjang lengan berdasarkan torsi maksimal motor (lihat torsi = gaya × jarak).
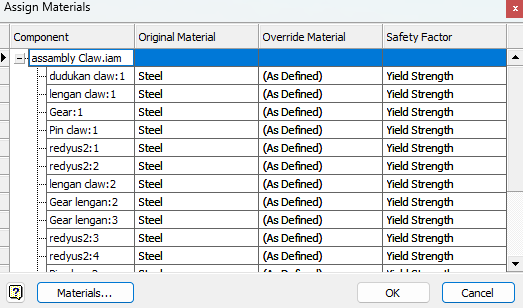
Tetapkan spesifikasi material:
- Plat baja ringan 3 mm untuk struktur utama.
- Opsi: steel gripper untuk komponen ringan.
design masukan pada sofware inventor dengan sfesifik :
Tetapkan boundary conditions:
- Fix base → semua pergerakan dikunci.
- Apply force → beban 700 gram (6.87 N) di ujung gripper.
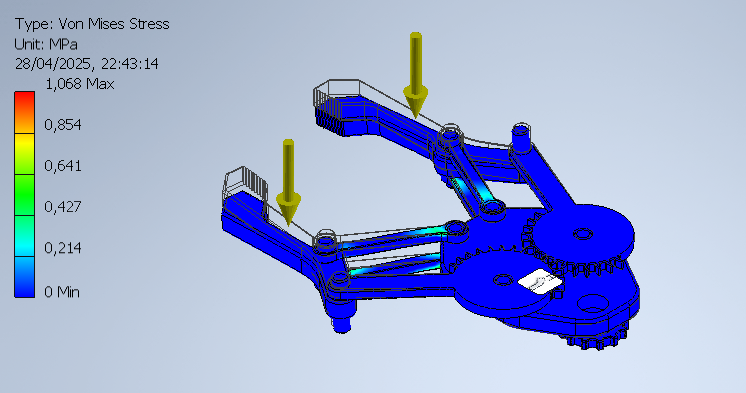
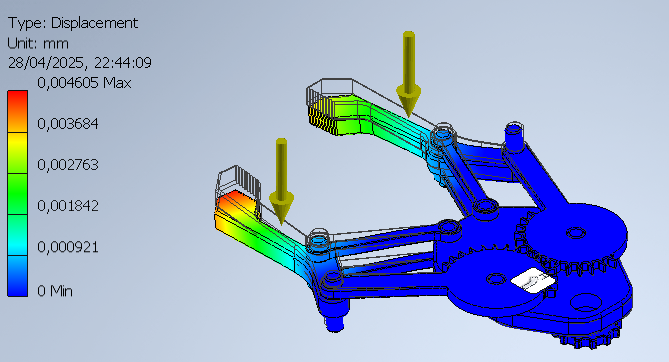
Jalankan analisis statik:
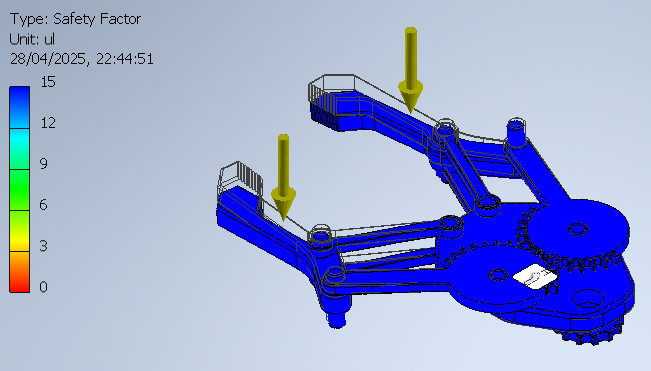
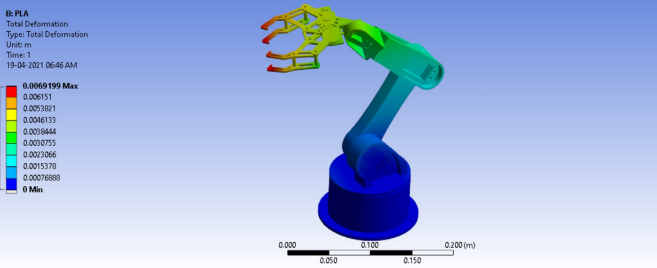
- Output: Total Deformation, Von Mises Stress, Safety Factor.
Interpretasi hasil:
- Safety Factor minimal disarankan: 2.
- Jika deformasi melebihi 5 mm → revisi desain.
material yang di gunakan steel
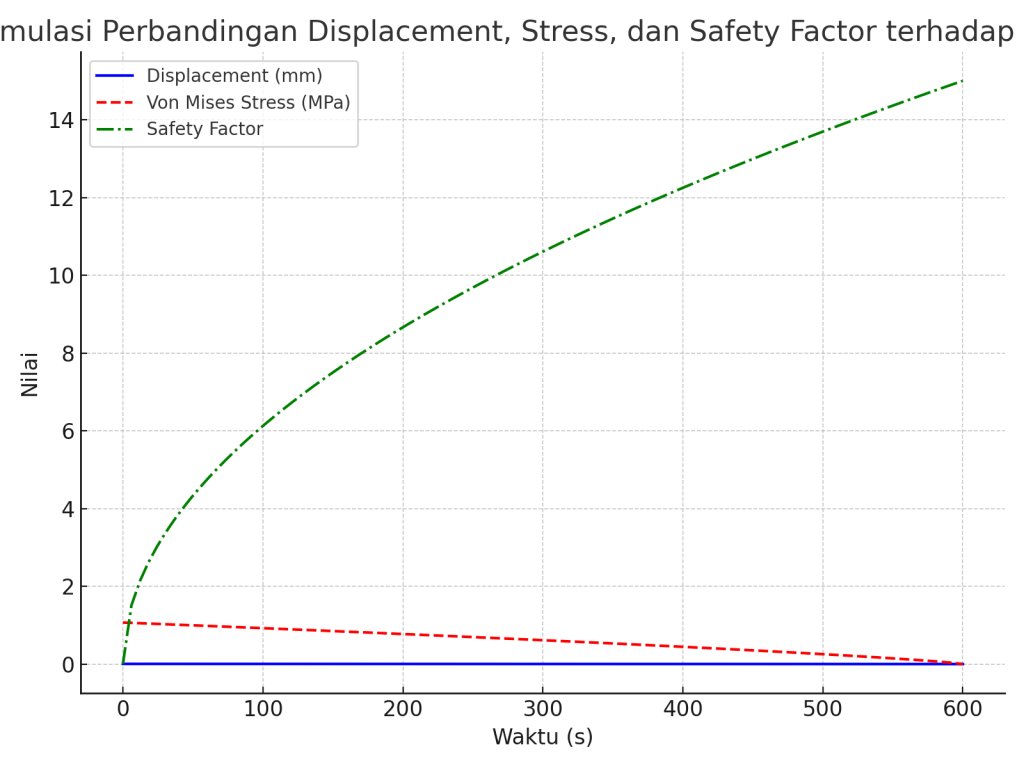
Type in Von mies Stress
type in Displacement
Type in Safe Factor
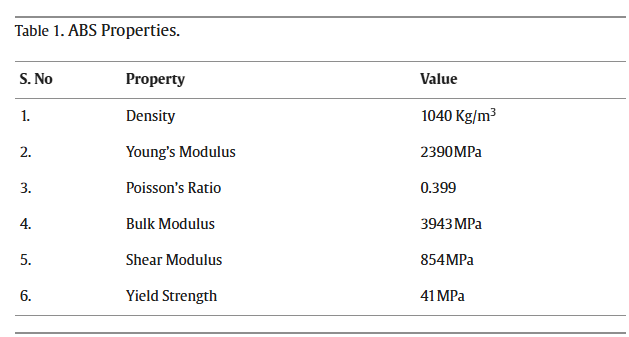
Material PLA dan menggunakan ANSYS deformation yang terjadi
H. Results & Discussion
Grafik perbandingan robotic arm menunjukkan variasi performa antar beberapa jenis lengan robotik. Setiap batang mewakili satu robotic arm, di mana semakin tinggi batangnya, semakin baik kinerjanya dalam parameter tertentu. Terlihat bahwa ada satu robotic arm yang memiliki performa tertinggi, sementara yang lainnya berada di bawahnya dengan perbedaan yang cukup signifikan. Grafik ini memberikan gambaran umum mengenai efektivitas masing-masing robotic arm dan dapat membantu dalam memilih perangkat yang paling sesuai dengan kebutuhan spesifik.
I. Acknowledgments
Saya menyampaikan terima kasih yang sebesar-besarnya kepada Prof. Dr. Ir. Ahmad Indra Siswantara selaku dosen pengampu Mata Kuliah Metode Numerik. Berkat arahan dan ilmu yang Beliau sampaikan, saya dapat memahami konsep-konsep dalam metode numerik serta mengenal framework DAI5 yang sangat relevan dan aplikatif. Atas bimbingan Beliau pula, saya mampu menyusun Tugas Besar ini sebagai bagian dari pemenuhan Ujian Tengah Semester ini. wa’alaikumussalam warahmatullahi wabarakatuh.
J. References
1. Rashmi Sahni, Yusuf Parvez, Nathi Ram Chauhan, ‘‘Fabrication and repeatability
analysis of 3 links robotic arm used for color inspection”, IJRAR vol. 5, issue 3,
2018
2. W. M. H. W. Kadir, R. E. Samin, and B. S. K. Ibrahim, ‘‘Internet controlled robotic
arm,” Procedia Eng., vol. 41, no. Iris, pp. 1065–1071, 2012, doi: 10.1016/j.
proeng.2012.07.284
3. J Ardiansyah, R.A, Perancangan Sistem Pengendali
Robot melalui Internet menggunakan Raspberry Pi,
Journal Otomasi Kontrol dan Instrumentasi Vol 8 (1)
ISSN : 2085-2517. 2016
4. G. R. Anandya, Rancang Bangun Lengan Robot Penjepit PCB 3 DOF Berbasis Arduino Untuk
Proses Etching PCB Otomatis, Surabaya: Institut Teknologi Sepuluh Nopember, 2017.
5. Jeong, I.B., Ko, W.R., Park, G.M., Kim, D.H., Yoo, Y.H., Kim, J.H., 2017. Task intelligence
of robots: neural model-based mechanism of thought and online motion planning.
IEEE Trans Emerg Top Comput Intell 1, 41–50. https://doi.org/10.1109/
TETCI.2016.2645720
6. Neeraj Mishra 3 June 2021 Design and analysis of a robotic arm under different loading conditions
using FEA simulation
________________
The 33 DAI5 Implementation Evaluation Criteria
________________
Based on: “Analisis Sistem dan kekuatan cekam dari Robotic Arm pada robot selam “
by Reza Juniawan (2306155470)
Deep Awareness of I (DAI) dalam Konteks Proyek Robotic Arm di Bidang Teknik Mesin
1. Consciousness of Purpose:
Selalu berusaha mengingat Tuhan dalam setiap tahapan proyek, serta memandang perancangan dan pengendalian robotic arm sebagai cerminan keteraturan dan kecanggihan ciptaan-Nya yang menginspirasi rekayasa manusia.
2. Self-awareness:
Menyadari peran diri sebagai insinyur mesin yang bertanggung jawab secara teknis dan moral dalam merancang sistem robotik yang presisi dan bermanfaat.
3. Ethical Considerations:
Menanamkan niat bahwa penelitian dan pengembangan robotic arm bertujuan untuk memberi kemaslahatan bagi umat manusia, seperti membantu proses manufaktur, rehabilitasi medis, atau tugas-tugas berbahaya, serta menjaga amanah ilmu yang dimiliki.
4. Integration of CCIT (Cara Cerdas Ingat Tuhan):
Secara eksplisit menjaga kesadaran kepada Tuhan selama proses desain, analisis kinematika-dinamika, pemrograman kontrol, hingga implementasi robotic arm.
5. Critical Reflection:
Merenungkan bahwa prinsip-prinsip gerak mekanis, sensorik, dan kontrol pada robotic arm sejatinya merupakan bagian dari keteraturan hukum fisika yang telah ditetapkan Tuhan sebagai inspirasi dan panduan teknis.
6. Continuum of Awareness:
Menunjukkan kesinambungan kesadaran spiritual dari awal proses perencanaan, saat melakukan simulasi gerak dan kontrol, hingga pengujian akhir robotic arm, serta dalam dokumentasi hasil akhir proyek.
Intention (Niat dan Tujuan dalam Proyek Robotic Arm)
7. Clarity of Intent:
Menetapkan niat untuk memperdalam pemahaman mengenai sistem aktuasi, kendali, dan dinamika robotic arm, serta berkontribusi pada otomatisasi yang aman dan bermanfaat bagi manusia.
8. Alignment of Objectives:
Menyelaraskan tujuan teknis proyek (seperti presisi gerakan, efisiensi energi, dan responsivitas) dengan nilai-nilai universal seperti peningkatan kualitas hidup, inklusivitas teknologi, dan tanggung jawab sosial.
9. Relevance of Intent:
Fokus pada permasalahan nyata: keterbatasan manusia dalam melakukan pekerjaan repetitif, berisiko tinggi, atau presisi tinggi yang dapat dibantu dengan robotic arm.
10. Sustainability Focus:
Berorientasi pada perancangan robotic arm yang efisien, tahan lama, mudah dipelihara, dan hemat energi, guna mendukung penggunaan jangka panjang dan minim limbah.
11. Focus on Quality:
Menekankan pentingnya validasi hasil desain dan simulasi robotic arm dengan data eksperimen nyata untuk memastikan keakuratan dan keandalannya.
Initial Thinking (Pemikiran Awal tentang Permasalahan Robotic Arm)
12. Problem Understanding:
Mengidentifikasi masalah teknis seperti keterbatasan jangkauan, akurasi gerak, serta kestabilan sistem kendali pada robotic arm yang digunakan dalam aplikasi spesifik (industri, medis, atau pendidikan).
13. Stakeholder Awareness:
Mempertimbangkan kebutuhan pengguna akhir, seperti operator pabrik, tenaga medis, atau pelajar; serta aspek keselamatan dan ergonomi saat menggunakan robotic arm.
14. Contextual Analysis:
Masalah dianalisis dalam konteks spesifik aplikasi robotic arm—misalnya pada lini perakitan industri, pelayanan rehabilitasi, atau simulasi edukatif.
15. Root Cause Analysis:
Menggali akar masalah melalui analisis sistem mekanik (kinematika dan dinamika), kontrol (PID, AI, atau fuzzy logic), serta pemilihan material dan desain aktuator.
16. Relevance of Analysis:
Menggunakan pendekatan numerik (misalnya, simulasi gerak menggunakan MATLAB atau SolidWorks Motion) untuk memahami dan memecahkan permasalahan praktis seperti ketidaktepatan gerak atau osilasi berlebih.
17. Use of Data and Evidence:
Mengandalkan hasil simulasi dan data eksperimen (misalnya uji lengan robotik di laboratorium) untuk memastikan bahwa solusi yang dirancang akurat, dapat direplikasi, dan aplikatif.
Idealization (Pengidealan dalam Desain dan Simulasi Robotic Arm)
18. Assumption Clarity:
Mendefinisikan asumsi sistem: rigid body motion, friksi minimal di joint, beban ujung tetap, dan kontrol dilakukan secara real-time dengan model dinamik berbasis persamaan Lagrangian atau Newton-Euler.
19. Creativity and Innovation:
Menggabungkan metode simulasi multibody dynamics (seperti SolidWorks Motion atau ADAMS) dengan pemrograman kontrol numerik menggunakan MATLAB/Simulink.
20. Physical Realism:
Menggunakan model dinamik yang menggambarkan kondisi sebenarnya dari lengan robot, termasuk efek beban, kecepatan gerak, dan torsi aktuator.
21. Alignment with Intent:
Idealization dilakukan untuk mendukung niat merancang robotic arm yang akurat, handal, dan dapat menangani tugas-tugas spesifik sesuai dengan tujuan aplikasi.
22. Scalability and Adaptability:
Model dikembangkan agar dapat disesuaikan dengan berbagai ukuran, konfigurasi joint (2 DOF, 6 DOF), dan variasi beban kerja yang berbeda.
23. Simplicity and Elegance:
Menggunakan pendekatan model yang cukup sederhana untuk efisiensi komputasi namun cukup kompleks untuk menangkap fenomena penting seperti osilasi, backlash, dan overshoot pada kontrol.
V. Instruction (Set Instruksi Proyek Robotic Arm)
24. Clarity of Steps:
Langkah-langkah kerja dijelaskan sistematis: mulai dari perancangan mekanis, penentuan parameter (massa, panjang lengan, torsi), pembuatan model simulasi, penentuan algoritma kontrol, hingga uji eksperimental.
25. Comprehensiveness:
Seluruh aspek penting dianalisis: presisi gerakan, respons dinamis, kestabilan kontrol, hingga efisiensi energi aktuator.
26. Physical Interpretation:
Memberikan interpretasi fisik terhadap output simulasi—misalnya, menjelaskan overshoot sebagai akibat dari rasio torsi/inersia, atau vibrasi sebagai akibat dari ketidakseimbangan beban.
27. Error Minimization:
Akurasi dijaga dengan menguji beberapa skenario simulasi dan membandingkan hasil dengan pengukuran aktual pada prototipe robotic arm.
28. Verification and Validation:
Model divalidasi dengan membandingkan output simulasi terhadap data eksperimen—seperti tracking error, waktu respons, dan kestabilan dalam sistem kontrol tertutup.
29. Iterative Approach:
Dilakukan iterasi desain dan simulasi untuk memperbaiki asumsi awal jika hasil belum sesuai, baik dalam aspek mekanis maupun kontrol.
30. Sustainability Integration:
Memperhitungkan ketahanan komponen (material joint, motor, gearbox) terhadap kelelahan akibat siklus kerja berulang dalam jangka panjang.
31. Communication Effectiveness:
Menggunakan diagram gerak, grafik respons waktu, dan visualisasi 3D untuk menjelaskan desain dan kinerja robotic arm secara jelas.
32. Alignment with the DAI5 Framework:
Seluruh proses dirancang dan dilaksanakan dengan menjaga kesinambungan kesadaran spiritual (DAI), bahwa ilmu dan teknologi adalah amanah dan sarana untuk kebermanfaatan.
33. Documentation Quality:
Laporan proyek disusun lengkap dan terstruktur: mencakup abstrak, latar belakang, tujuan, metodologi, hasil simulasi, analisis, diskusi, dan referensi ilmiah.