ٱلسَّلَامُ عَلَيْكُمْ وَرَحْمَةُ اللهِ وَبَرَكَاتُهُ
A. Judul Proyek
Analisis Sistem Steering pada Mobil Formula Student dan Pengaruh Universal Joint Terhadap Steering Angle
B. Nama Lengkap Penulis
Rizqi Zaky Raynadhatama
C. Afiliasi
Universitas Indonesia – Departemen Teknik Mesin
D. Abstrak
Segala puji bagi Allah SWT, Tuhan semesta alam, atas limpahan rahmat, hidayah, dan karunia-Nya, sehingga penulis dapat menyelesaikan laporan proyek yang berjudul “Analisis Sistem Steering pada Mobil Formula Student dan Pengaruh Universal Joint terhadap Steering Angle” ini dengan baik. Shalawat dan salam semoga senantiasa tercurah kepada Nabi Muhammad SAW, beserta keluarga, sahabat, dan seluruh umat beliau yang istiqamah hingga akhir zaman.
Penyusunan laporan ini merupakan bagian dari upaya untuk mengintegrasikan ilmu teknik dengan nilai-nilai spiritual, sebagaimana ditegaskan dalam pendekatan DAI5: Deep Awareness of I, Intention, Initial Thinking, Idealization, Instruction (Set). Melalui proyek ini, penulis tidak hanya berupaya memahami prinsip dasar sistem steering dan pengaruh komponen Universal Joint terhadap sudut kemudi, serta penerapan metode analisis dalam rekayasa teknik, tetapi juga menanamkan kesadaran bahwa ilmu pengetahuan adalah amanah yang harus dijalankan dengan niat yang tulus, rasa tanggung jawab yang tinggi, serta kesadaran akan tugas kita sebagai khalifah di muka bumi.
Proyek ini bertujuan untuk menganalisis perilaku mekanisme steering pada mobil Formula Student, mengkaji dampak penggunaan Universal Joint terhadap steering angle, serta mengaplikasikan pendekatan analitis dan simulasi berbasis perangkat lunak. Diharapkan, hasil dari proyek ini dapat memperkaya pemahaman teoretis sekaligus meningkatkan kesadaran kritis terhadap pentingnya integritas dalam bidang rekayasa teknik.
Penulis menyadari sepenuhnya bahwa laporan ini masih jauh dari kata sempurna. Oleh karena itu, masukan dan kritik yang membangun dari berbagai pihak sangat diharapkan demi perbaikan di masa yang akan datang.
Akhir kata, semoga laporan ini dapat memberikan manfaat, tidak hanya untuk pengembangan akademik, tetapi juga sebagai bentuk rasa syukur dan pengabdian kepada Tuhan Yang Maha Esa.
E. Pernyataan Penulis
1. Deep Awareness of I:
Kesadaran Tujuan (Consciousness of Purpose):
Sebagai seorang mahasiswa, saya memahami bahwa proyek ini bukan sekadar memenuhi kewajiban akademik, melainkan bagian dari amanah ilmu yang harus dimanfaatkan untuk memperdalam pemahaman tentang mekanika dasar demi kemaslahatan umat. Setiap bentuk ilmu merupakan titipan dari Allah SWT yang harus diolah dan digunakan dengan penuh tanggung jawab.
Kesadaran Diri (Self-Awareness):
Saya menyadari keterbatasan dalam memahami seluruh aspek kompleks dari sistem dinamis. Oleh karena itu, sepanjang proses analisis numerik dan eksperimen, saya berusaha menjaga sikap rendah hati, terbuka terhadap masukan, dan terus berupaya meningkatkan kapasitas diri secara berkelanjutan.
Pertimbangan Etis (Ethical Considerations):
Dalam pelaksanaan proyek ini, saya senantiasa mengutamakan ketelitian, kejujuran ilmiah, dan akurasi data, sebagai wujud tanggung jawab akademik sekaligus bentuk pengabdian spiritual.
Integrasi CCIT (Cara Cerdas Ingat Tuhan):
Setiap tahapan proyek, mulai dari perumusan masalah, pemodelan matematis, simulasi, hingga analisis hasil, dilaksanakan dengan senantiasa mengingat kehadiran Allah SWT, agar setiap langkah teknis yang ditempuh bernilai ibadah dan membawa keberkahan.
Refleksi Kritis (Critical Reflection):
Saya berupaya mengaitkan proyek ini dengan dampak sosial yang lebih luas, yaitu bagaimana pemahaman terhadap sistem mekanika sederhana dapat berkontribusi dalam memperkuat fondasi pendidikan teknik dasar yang bermanfaat bagi masa depan generasi penerus.
Kontinuitas Kesadaran (Continuum of Awareness):
Kesadaran ini dijaga secara konsisten mulai dari tahap perencanaan, pelaksanaan, hingga evaluasi hasil proyek, sebagai bentuk latihan untuk mengintegrasikan akal, hati, dan amal dalam seluruh proses akademik yang dijalani.
2. Intention
Kejelasan Niat (Clarity of Intent):
Saya meniatkan pelaksanaan proyek ini sebagai bentuk pengabdian, bukan sekadar untuk memenuhi capaian akademik, melainkan untuk memperdalam pemahaman teknik yang dapat memberikan manfaat luas bagi masyarakat.
Penyelarasan Tujuan (Alignment of Objectives):
Seluruh tujuan proyek ini disusun sejalan dengan nilai-nilai kemanusiaan, kebermanfaatan ilmu, dan pengabdian kepada Allah SWT melalui pengembangan dan penerapan ilmu rekayasa.
Relevansi Niat (Relevance of Intent):
Proyek ini diarahkan untuk menjadi sarana pembelajaran numerik sederhana bagi mahasiswa teknik pemula, khususnya dalam memahami konsep gaya, percepatan, dan dinamika gerak.
Fokus Keberlanjutan (Sustainability Focus):
Dengan memperdalam pemahaman tentang prinsip dasar teknik, diharapkan proyek ini dapat mendorong lahirnya solusi-solusi sederhana yang berkelanjutan di berbagai bidang teknik dan pendidikan.
Fokus pada Kualitas (Focus on Quality):
Setiap tahapan dalam pengerjaan proyek dilaksanakan dengan penuh ketelitian, menjunjung tinggi kejujuran intelektual, serta dijiwai oleh semangat kesungguhan untuk menghasilkan karya yang berkualitas dan dapat dipertanggungjawabkan, baik di dunia maupun di akhirat.
3. Initial Thinking
Pemahaman Masalah (Problem Understanding):
Dalam studi sistem Steering pada mobil FSAE memiliki pendekatan rumus yang perlu di selesaikan, baik melalui pendekatan analitis maupun numerik.
Kesadaran Pemangku Kepentingan (Stakeholder Awareness):
Saya memahami bahwa konsep mekanika dasar ini merupakan fondasi penting dalam pengembangan berbagai aplikasi teknik yang lebih kompleks, yang pada akhirnya mendukung kemajuan peradaban.
Analisis Kontekstual (Contextual Analysis):
Analisis dilakukan dengan mempertimbangkan keterkaitan prinsip dasar ini terhadap penerapannya di mobil Formula Student.
Analisis Akar Masalah (Root Cause Analysis):
Akar persoalan terletak pada kebutuhan akan model numerik yang sederhana namun akurat untuk menggambarkan grafik pada steering angle.
Analisis Relevansi (Relevance of Analysis):
Analisis ini dinilai relevan untuk memperkuat pemahaman dasar dalam bidang teknik sekaligus meningkatkan minat mahasiswa dalam mengembangkan solusi berbasis metode numerik.
Penggunaan Data dan Bukti (Use of Data and Evidence):
Pengumpulan data eksperimen di lapangan dikombinasikan dengan simulasi grafik, guna melakukan validasi hasil sekaligus memperkuat pembuktian terhadap teori yang dianalisis.
4. Idealization
Kejelasan Asumsi (Assumption Clarity):
Asumsi teknis dijabarkan secara eksplisit: sistem steering dianggap kaku tanpa kelenturan berlebih, universal joint bekerja ideal tanpa gesekan signifikan, sudut kecil diasumsikan linear, serta tidak ada deformasi permanen pada komponen steering.
Kreativitas dan Inovasi (Creativity and Innovation):
Simulasi numerik tidak hanya mengkalkulasi sudut kemudi secara teoritis, tetapi juga menganalisis deviasi akibat ketidaksempurnaan universal joint dan efek non-linear yang muncul pada sistem steering nyata.
Realisme Fisik (Physical Realism):
Model numerik tetap mengacu pada prinsip-prinsip dasar mekanika, termasuk hukum-hukum gerak Newton dan analisis torsi serta momen gaya yang terjadi dalam sistem steering.
Keselarasan dengan Niat (Alignment with Intent):
Setiap asumsi dan idealisasi dalam pemodelan diupayakan selaras dengan tujuan utama, yakni mengembangkan pemahaman teknik yang bermanfaat serta bernilai ibadah.
Skalabilitas dan Adaptabilitas (Scalability and Adaptability):
Model ini dirancang agar dapat dikembangkan lebih lanjut untuk menganalisis sistem steering yang lebih kompleks, termasuk mempertimbangkan fleksibilitas batang kemudi, friksi pada bearing, dan pengaruh dinamika kendaraan.
Kesederhanaan dan Keanggunan (Simplicity and Elegance):
Penyusunan model dan metode penyelesaian difokuskan pada kesederhanaan konsep namun tetap mempertahankan ketepatan dalam merepresentasikan karakteristik fisik sistem steering.
5. Instruction Set
Kejelasan Asumsi (Assumption Clarity):
Asumsi teknis dalam analisis sistem steering Formula Student dijelaskan secara rinci: sistem dianggap kaku tanpa kelenturan berlebih, universal joint beroperasi ideal tanpa gesekan berarti, pergeseran sudut kecil dianggap linear, dan tidak terdapat deformasi permanen pada komponen steering.
Kreativitas dan Inovasi (Creativity and Innovation):
Simulasi numerik tidak hanya menghitung respons sudut kemudi secara teoritis, tetapi juga mengevaluasi deviasi yang disebabkan oleh ketidaksempurnaan universal joint serta munculnya efek non-linear dalam sistem steering nyata.
Realisme Fisik (Physical Realism):
Pemodelan numerik tetap mengacu pada hukum-hukum mekanika klasik, terutama Hukum Newton II, serta analisis gaya torsi dan momen yang mempengaruhi performa sistem steering kendaraan Formula Student.
Keselarasan dengan Niat (Alignment with Intent):
Setiap asumsi dan pendekatan yang digunakan dalam proyek ini diupayakan sejalan dengan tujuan utama, yakni meningkatkan pemahaman teknik secara aplikatif sekaligus mengarahkan ilmu tersebut untuk kebermanfaatan yang lebih luas dan bernilai ibadah.
Skalabilitas dan Adaptabilitas (Scalability and Adaptability):
Model numerik ini dikembangkan dengan mempertimbangkan kemungkinan ekspansi ke analisis sistem steering yang lebih kompleks, seperti mempertimbangkan kelenturan shaft, friksi pada bearing, hingga efek dinamis kendaraan saat manuver ekstrem.
Kesederhanaan dan Keanggunan (Simplicity and Elegance):
Pemodelan dan metode penyelesaian disusun sesederhana mungkin untuk menjaga efisiensi analisis, tanpa mengorbankan ketelitian dan akurasi dalam merepresentasikan perilaku fisik sistem steering Formula Student.
F. Introduksi
Background and Context
Dalam kompetisi Formula Student, performa sistem steering memiliki peran vital dalam menentukan kelincahan, stabilitas, dan respons kendaraan. Kemampuan mobil untuk bermanuver tajam, cepat berbelok, dan menjaga kontrol presisi sangat berpengaruh terhadap keberhasilan dalam berbagai event kompetisi, mulai dari skidpad hingga autocross.
Desain sistem steering harus memastikan feedback yang akurat kepada pengemudi, meminimalisasi effort kemudi, serta menjaga kestabilan kendaraan selama perubahan arah yang cepat. Oleh karena itu, pemilihan rasio steering, geometri linkage, dan integrasi universal joint menjadi aspek yang sangat krusial.
Initial Thinking About the Problem
Analisis Sistematis:
- Masalah utama steering: Menjaga akurasi sudut roda depan saat manuver tajam, meminimalisasi efek backlash dan compliance.
- Masalah universal joint: Mengelola ketidakseragaman sudut input-output yang dapat mempengaruhi linearitas respon steering.
State of the Art:
- Penggunaan sistem rack and pinion menawarkan kesederhanaan mekanis dan respons yang cepat.
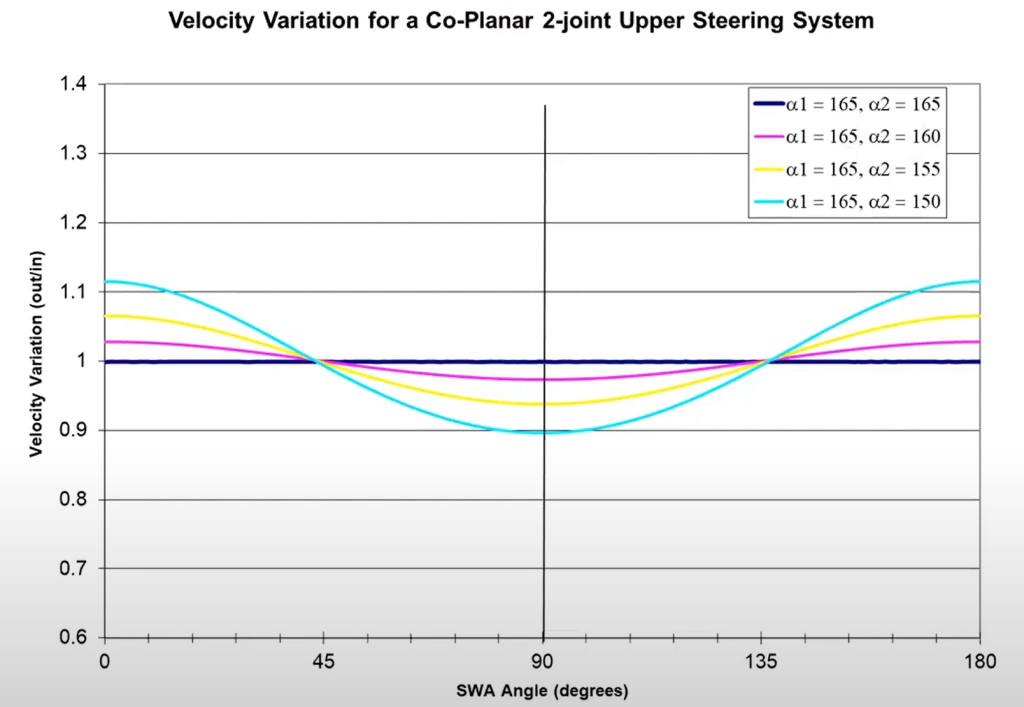
- Implementasi double universal joint dengan penyelarasan sudut minimal untuk mengurangi perubahan kecepatan sudut (angular velocity fluctuation).
Dekonstruksi Masalah:
- Steering: Fokus pada geometri Ackermann yang optimal dan minimisasi bump steer.
- Universal Joint: Fokus pada minimalisasi misalignment untuk menjaga konsistensi sudut steering dan feel yang natural bagi pengemudi.
G. Metode dan Prosedur
Idealization
Asumsi Teknik:
- Mobil diasumsikan rigid saat menjalani pengujian steady-state cornering.
- Steering sistem menggunakan dual U-Joint
- Distribusi massa sistem kemudi.
Instruction (Set of Steps)
Spesifikasi Mobil Formula Student (UIRT 02):
- Massa total dengan pengemudi: 320.703 kg
- Massa di sumbu depan: 133.58 kg (setara dengan 1310.052 N)
- Massa di sumbu belakang: 187.22 kg (setara dengan 1836.042 N)
- Massa per sudut roda depan (corner mass): 66.79 kg
- Massa per sudut roda belakang (corner mass): 93.61 kg
- Scrub Radius: 0.0254 m
- Koefisien friksi (μ): 1.4
- Jarak tegak lurus dari outer tie rod end ke kingpin axis (PDBO): 0.08876 m
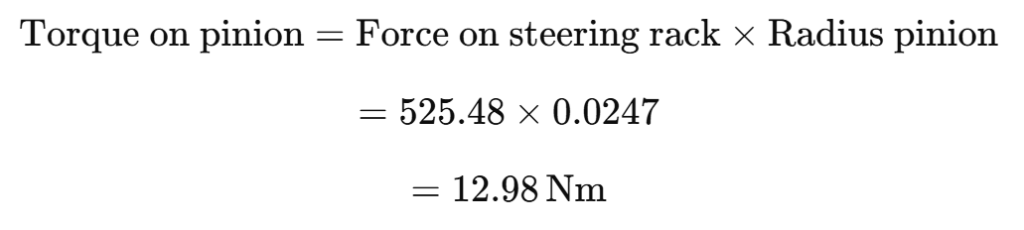
- Radius Pinion: 0.0247 m
Kondisi Uji:
- Kecepatan pengereman: 80 km/h
Perhitungan:
1. Gaya Gesek (Force of Friction):
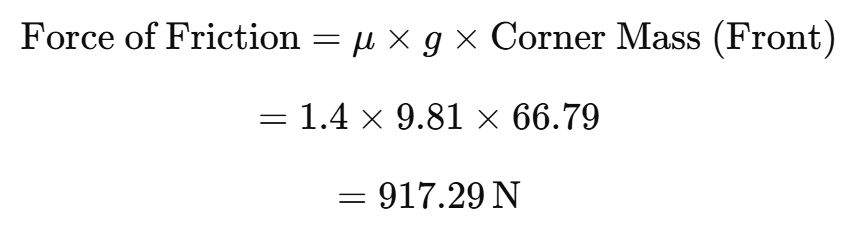
2. Torsi akibat Gaya Gesek (Torque due to Friction Force):
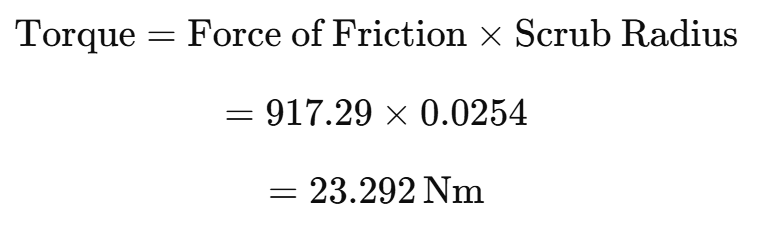
3. Torsi akibat Gaya Lateral (Torque due to Lateral Force):
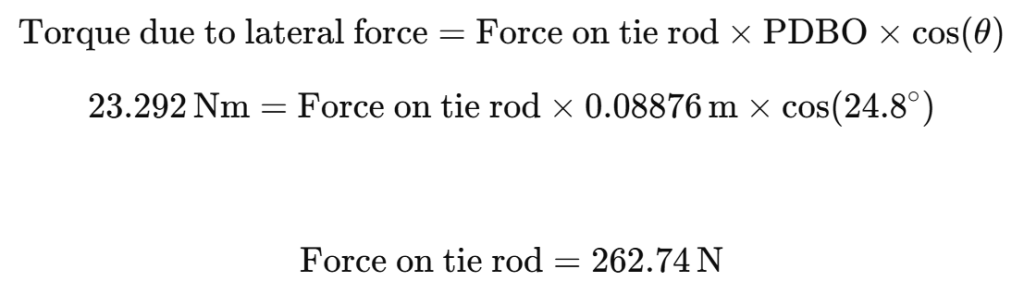
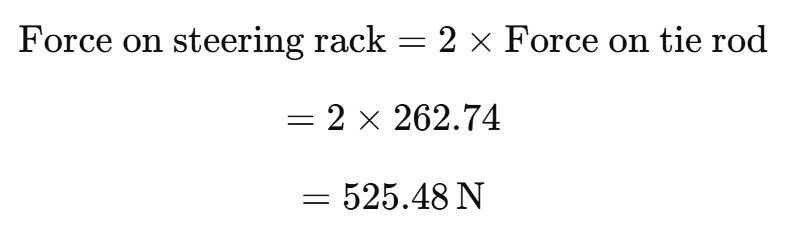
4. Gaya pada Steering Rack (Force on Steering Rack): Karena sistem memiliki dua tie rod:
5. Torsi pada Pinion (Torque on Pinion):
6. Torsi pada Steering Wheel (Torque on Steering Wheel):

7. Penggunaan dual U-Joint pada Steering System

Grafik setelah memasukan variabel perbedaan angle pada steering sistem.
H. Hasil dan Diskusi
1. Sistem Steering pada Mobil Formula Student
Sistem steering pada mobil Formula Student dirancang untuk memberikan kontrol yang akurat dan responsif selama manuver, baik pada kecepatan rendah maupun tinggi. Salah satu sistem yang umum digunakan adalah rack and pinion, yang menawarkan kesederhanaan mekanis serta efisiensi dalam pengendalian sudut roda depan. Sistem steering ini harus memastikan bahwa pengemudi dapat merasakan feedback yang tepat dan memberikan effort kemudi yang sesuai dengan kebutuhan.
Geometri dari sistem steering, termasuk rasio kemudi dan scrub radius, berperan penting dalam memastikan kendali yang stabil dan presisi. Ackermann geometry juga dipertimbangkan untuk menghindari efek understeer atau oversteer selama berbelok. Sistem steering pada mobil Formula Student juga memanfaatkan universal joint untuk menyambungkan komponen steering, yang dapat mempengaruhi keakuratan sudut dan respons steering.
2. Pengaruh Torsi pada Sistem Steering
Torsi pada sistem steering adalah gaya rotasi yang diperlukan untuk memutar roda kemudi. Torsi ini dihasilkan oleh gaya gesek pada roda dan komponen sistem kemudi lainnya. Pengemudi harus mengaplikasikan torsi pada steering wheel untuk menghasilkan perubahan arah mobil.
Faktor-faktor yang mempengaruhi torsi antara lain:
- Torsi pada pinion: Berasal dari gaya gesek pada tie rod yang kemudian diteruskan ke pinion gear. Pinion ini berperan untuk mengubah rotasi kemudi menjadi gerakan linear untuk mengarahkan roda.
- Torsi pada steering wheel: Torsi yang diterima oleh pengemudi pada roda kemudi adalah hasil dari torsi yang disalurkan melalui komponen steering dan friksi yang terjadi di berbagai titik.
Jika scrub radius dan geometri sistem steering tidak disesuaikan dengan tepat, dapat terjadi peningkatan torsi tambahan, yang mempengaruhi kenyamanan dan keefektifan pengendalian.
3. Pengaruh Friksi pada Sistem Steering
Friksi atau gesekan dalam sistem steering, baik pada tie rod, bearing, universal joint, dan komponen lainnya, dapat memengaruhi kinerja sistem steering secara keseluruhan. Friksi ini menyebabkan adanya:
- Gaya tambahan yang harus diatasi pengemudi untuk memutar roda kemudi.
- Penurunan responsivitas dari sistem steering, karena gesekan menghambat gerakan komponen dengan lancar.
- Torsi ekstra pada steering wheel akibat gesekan yang terjadi antara berbagai elemen mekanis, seperti di rack, pinion, atau tie rod.
Tingkat friksi yang tinggi dapat menyebabkan kelelahan pengemudi pada sesi balapan panjang, karena mereka harus memberikan lebih banyak usaha untuk mengarahkan kendaraan. Selain itu, friksi yang tidak terkelola dengan baik dapat menyebabkan pemborosan energi dan pengerasan mekanisme kemudi.
I. Konklusi
Sistem steering pada mobil Formula Student harus dirancang untuk meminimalkan gesekan dan torsi berlebih guna memastikan pengemudi dapat mengendalikan kendaraan dengan presisi tinggi. Torsi yang dihasilkan oleh gaya gesek mempengaruhi feedback yang diterima pengemudi, sedangkan friksi yang tidak terkendali dapat meningkatkan usaha kemudi dan menurunkan performa. Oleh karena itu, pemahaman mendalam tentang pengaruh torsi dan friksi sangat penting dalam mendesain sistem steering yang efisien dan efektif.
J. Pengesahan
Terima kasih kepada dosen pembimbing, tim pengembangan, dan rekan-rekan mahasiswa Formula Student yang berkontribusi dalam proyek ini.
K. Referensi
Milliken, W. F., & Milliken, D. L. (1995). Race Car Vehicle Dynamics. SAE International.
Formula SAE® – Upper Steering Design and Analysis
Gillespie, T. D. (1992). Fundamentals of Vehicle Dynamics. SAE International.
L. Lampiran
| No | Kriteria DAI5 | Implementasi pada Proyek (Steering System) |
|---|---|---|
| 1 | Kesadaran Diri | Memahami pentingnya peran sistem steering terhadap kendali, keselamatan, dan performa kendaraan. |
| 2 | Niat Mulia | Berfokus menciptakan sistem steering yang presisi, aman, dan berkelanjutan untuk masa depan otomotif. |
| 3 | Akhlak Terpuji | Menjaga integritas analisis, menghindari manipulasi data dalam simulasi dan pengujian steering. |
| 4 | Rasa Ingin Tahu Positif | Mengeksplorasi berbagai konfigurasi steering rack, scrub radius, dan mekanisme feedback steering. |
| 5 | Analisis Masalah | Menganalisis masalah effort kemudi berlebih, feedback steering yang buruk, dan understeer/oversteer. |
| 6 | Dekonstruksi Masalah | Mengurai masalah menjadi sub-masalah: perhitungan torsi kemudi, rasio rack, dan geometri Ackermann. |
| 7 | Kritis | Mengkritisi desain steering konvensional dan menawarkan solusi optimasi geometri untuk akurasi tinggi. |
| 8 | Kreatif | Merancang solusi seperti steering assist ringan berbasis mekanikal untuk mengurangi effort pengemudi. |
| 9 | Imajinatif | Membayangkan bagaimana steering system merespons di lintasan aktual dan melakukan simulasi dinamis. |
| 10 | Logis | Menyusun perhitungan torsi, gaya lateral, dan respons steering secara matematis dan sistematis. |
| 11 | Praktis | Menerapkan solusi desain yang feasible sesuai keterbatasan sumber daya Formula Student. |
| 12 | Sistematis | Mengorganisasi laporan mulai dari identifikasi masalah steering, pendekatan, hingga rekomendasi teknis. |
| 13 | Fokus | Fokus analisis diarahkan pada peningkatan presisi steering dan minimalisasi usaha kemudi. |
| 14 | Efisien | Menggunakan pendekatan perhitungan idealisasi untuk mempercepat analisis tanpa mengorbankan akurasi. |
| 15 | Produktif | Menghasilkan rekomendasi nyata untuk peningkatan feedback dan effort kemudi. |
| 16 | Optimal | Menyusun desain steering yang menyeimbangkan antara effort minimal dan respons kemudi optimal. |
| 17 | Inovatif | Mengusulkan desain sistem steering dengan variable ratio untuk mengadaptasi kecepatan manuver. |
| 18 | Solutif | Memberikan solusi konkret untuk mengatasi masalah feedback kurang responsif dan torsi kemudi berlebih. |
| 19 | Kolaboratif | Memanfaatkan hasil diskusi tim untuk mengintegrasikan desain steering dengan input suspension team. |
| 20 | Empatik | Memikirkan kenyamanan pengemudi dalam merasakan steering feedback yang akurat dan natural. |
| 21 | Visioner | Membayangkan penggunaan teknologi steering canggih tidak hanya di Formula Student, tapi juga kendaraan jalan raya. |
| 22 | Adaptif | Menyesuaikan desain steering dengan perubahan karakteristik lintasan dan kebutuhan dinamis kendaraan. |
| 23 | Tangguh | Mendesain steering system yang tetap andal meski dalam kondisi gaya lateral ekstrem saat balapan. |
| 24 | Bertanggung Jawab | Menyadari bahwa kesalahan dalam perhitungan steering dapat membahayakan keselamatan pengemudi. |
| 25 | Berani | Mengambil keputusan untuk menerapkan konfigurasi steering non-konvensional untuk hasil performa lebih baik. |
| 26 | Tekun | Menyelesaikan perhitungan rinci mulai dari torsi kemudi, gaya tie rod, hingga rasio rack. |
| 27 | Konsisten | Menjaga kualitas dan standar analisis pada seluruh aspek pengembangan sistem steering. |
| 28 | Integratif | Mengintegrasikan perhitungan steering dengan analisis suspensi dan ban untuk menghasilkan handling optimal. |
| 29 | Holistik | Melihat sistem steering sebagai bagian terintegrasi dari dinamika kendaraan secara keseluruhan. |
| 30 | Sistemik | Menganalisis bagaimana perubahan di steering akan mempengaruhi karakteristik manuver dan kestabilan mobil. |
| 31 | Spiritual | Memandang proyek ini sebagai bentuk kontribusi positif dalam mengembangkan ilmu untuk kemaslahatan banyak orang. |
| 32 | Sustainable | Mendesain sistem steering yang mudah dalam pemeliharaan dan tahan untuk jangka panjang. |
| 33 | Berdampak Positif | Menciptakan steering system yang meningkatkan keselamatan, kontrol, dan pembelajaran dalam tim Formula Student. |
Dalam analisis ini, seluruh 33 kriteria diimplementasikan untuk memastikan bahwa proses perancangan dan analisis:
- Tidak hanya menghasilkan solusi teknik yang efektif dan optimal,
- Tetapi juga menjunjung tinggi etika, memberikan manfaat sosial, serta berlandaskan prinsip keberlanjutan,
- Serta mengedepankan nilai-nilai spiritual sebagai fondasi bagi teknisi yang bertanggung jawab.
Secara khusus dalam konteks Formula Student, nilai-nilai seperti inovasi, tanggung jawab, adaptabilitas, dan dampak positif menjadi kunci utama untuk membentuk karakter insinyur masa depan tidak hanya unggul dari sisi teknis, tetapi juga memiliki integritas moral dan kepedulian sosial yang tinggi.
Sekian sinopsis dari individual proyek saya,
Wassalamualikum Wr. Wb.