A. Project Title
Analisis Seakeeping Kapal Menggunakan Metode Numerik dan Pendekatan DAI5
B. Author Complete Name
Muhammad Wildan Nugroho
NPM 2406360211
C. Affiliation
Departemen Teknik Mesin
Fakultas Teknik Universitas Indonesia
Mata Kuliah Metode Numerik – D4
D. Abstract
Seakeeping atau perilaku kapal di atas gelombang laut merupakan faktor krusial yang mempengaruhi keselamatan, kenyamanan, dan efisiensi operasional kapal. Gerakan kapal yang berlebihan, terutama heave, pitch, dan roll, dapat menyebabkan ketidaknyamanan awak kapal, kerusakan muatan, bahkan risiko kecelakaan. Penelitian ini bertujuan untuk menganalisis respons gerakan kapal terhadap gelombang sinusoidal reguler menggunakan metode numerik yang diintegrasikan dengan pendekatan DAI5 (Deep Awareness, Intention, Initial Thinking, Idealization, Implementation). Metode yang digunakan meliputi pemodelan matematis sistem dinamis orde dua, penyelesaian persamaan diferensial menggunakan metode Runge-Kutta orde 4 (RK4), serta simulasi berbasis Python. Parameter kapal meliputi massa 5000 kg, koefisien redaman 1200 Ns/m, dan kekakuan hidrostatik 80000 N/m, dengan gelombang input frekuensi 0.8 rad/s dan amplitudo 0.5 m. Hasil simulasi menunjukkan bahwa gerakan roll memiliki amplitudo terbesar (5.8°), diikuti pitch (3.7°), dan heave (0.314 m). Pendekatan DAI5 memberikan kerangka analisis yang terstruktur dan etis, tidak hanya berfokus pada akurasi numerik tetapi juga pada keselamatan jiwa dan tanggung jawab profesional. Integrasi metode numerik dan DAI5 terbukti efektif untuk analisis seakeeping kapal modern.
Kata Kunci: Seakeeping, heave, pitch, roll, metode numerik, Runge-Kutta orde 4, DAI5, keselamatan kapal.
E. Author Declaration
- Deep Awareness of I
Dalam penelitian ini, saya menyadari bahwa ilmu pengetahuan dan kemampuan analisis yang dimiliki manusia merupakan anugerah dari Tuhan Yang Maha Esa yang harus digunakan secara bertanggung jawab. Melalui pendekatan Deep Awareness of I, saya memahami bahwa bidang teknik perkapalan tidak hanya berfokus pada persamaan matematis dan hasil simulasi, tetapi juga pada upaya menjaga keselamatan jiwa, kelestarian lingkungan laut, dan keberlanjutan operasional kapal yang dirancang untuk mendukung kehidupan manusia.
Kajian mengenai analisis seakeeping kapal tidak hanya dipandang sebagai pemecahan persamaan diferensial dan komputasi numerik semata, tetapi juga sebagai bentuk kontribusi dalam meningkatkan keselamatan pelayaran, mencegah kerusakan muatan, serta melindungi awak kapal dari ketidaknyamanan dan risiko kecelakaan akibat gerakan roll yang ekstrem. Dengan pemahaman yang mendalam tentang perilaku kapal di gelombang, desain dan operasional kapal dapat berlangsung lebih aman, andal, dan manusiawi.
- Intention of the Project Activity
Tujuan dari penelitian ini adalah untuk menganalisis respons gerakan heave, pitch, dan roll pada kapal akibat gaya eksitasi gelombang laut melalui pendekatan metode numerik. Penelitian ini bertujuan untuk mengidentifikasi bagaimana parameter massa, koefisien redaman, kekakuan hidrostatik, dan frekuensi gelombang mempengaruhi amplitudo gerakan kapal serta stabilitas keseluruhan sistem.
Selain itu, penelitian ini juga bertujuan untuk mengintegrasikan pendekatan DAI5 dalam proses analisis teknik sehingga pola pikir engineering yang sistematis, kritis, sadar, dan etis dapat terbentuk. Melalui kajian ini, diharapkan dapat diperoleh pemahaman yang lebih baik mengenai pentingnya simulasi numerik berbasis RK4 serta kesadaran mendalam sebagai dasar pengambilan keputusan rekayasa yang bertanggung jawab.
F. Introduction
BAB I
PENDAHULUAN
1.1 Latar Belakang
Kapal merupakan moda transportasi massal yang vital bagi perdagangan dan logistik dunia. Dalam operasionalnya, kapal senantiasa berinteraksi dengan lingkungan laut yang dinamis, terutama gelombang. Perilaku kapal di atas gelombang, yang dikenal sebagai seakeeping, menjadi faktor penentu utama terhadap keselamatan, kenyamanan, dan efisiensi operasional.
Gerakan kapal akibat gelombang terdiri dari enam derajat kebebasan (6 DoF): surge (gerak maju-mundur), sway (gerak samping), heave (gerak naik-turun), roll (gerak miring ke samping), pitch (gerak angguk haluan-buritan), dan yaw (gerak belok kiri-kanan). Di antara keenam gerakan tersebut, heave, pitch, dan roll memiliki dampak paling signifikan terhadap performa kapal. Gerakan roll yang berlebihan dapat menyebabkan ketidaknyamanan penumpang, perpindahan muatan, bahkan risiko terbalik (capsizing). Gerakan pitch yang besar dapat menurunkan efisiensi propulsi dan menyebabkan slamming (hantaman air di haluan). Gerakan heave yang ekstrem dapat memicu mabuk laut (sea sickness) dan memperberat kerja sistem penyeimbang.
Untuk memahami dan memprediksi respons seakeeping, diperlukan model matematis yang dapat menggambarkan interaksi antara kapal dan gelombang. Persamaan diferensial orde dua yang melibatkan massa, redaman, dan kekakuan hidrostatik menjadi dasar pemodelan tersebut. Namun, kompleksitas sistem seringkali membuat solusi analitik sulit diperoleh, sehingga metode numerik menjadi pilihan utama. Oleh karena itu, diperlukan kajian lebih lanjut mengenai bagaimana integrasi metode numerik dan pendekatan DAI5 dapat memberikan analisis seakeeping yang lebih komprehensif dan bertanggung jawab.
1.2 Rumusan Masalah
- Bagaimana model matematis gerakan heave, pitch, dan roll pada kapal akibat gelombang sinusoidal?
- Bagaimana pengaruh parameter massa, koefisien redaman, dan kekakuan hidrostatik terhadap respons amplitudo gerakan kapal?
- Bagaimana metode numerik Runge-Kutta orde 4 (RK4) dapat digunakan untuk menyelesaikan persamaan dinamis gerakan kapal?
- Bagaimana pendekatan DAI5 dapat diintegrasikan dalam proses analisis numerik seakeeping?
- Apa rekomendasi desain atau operasional berdasarkan hasil simulasi untuk meningkatkan keselamatan kapal?
1.3 Tujuan Analisis
- Merumuskan model matematis sistem dinamis untuk gerakan heave, pitch, dan roll kapal.
- Menganalisis pengaruh parameter massa, koefisien redaman, kekakuan hidrostatik, dan frekuensi gelombang terhadap amplitudo respons.
- Mengimplementasikan metode Runge-Kutta orde 4 (RK4) dalam simulasi numerik respons gerakan kapal terhadap waktu.
- Mengintegrasikan pendekatan DAI5 (Deep Awareness, Intention, Initial Thinking, Idealization, Implementation) ke dalam seluruh tahapan analisis.
- Memberikan rekomendasi teknis untuk meningkatkan stabilitas dan keselamatan kapal berdasarkan hasil simulasi.
1.4 Manfaat Analisis
Penelitian ini diharapkan dapat memberikan pemahaman komprehensif mengenai analisis seakeeping kapal menggunakan metode numerik. Selain itu, penelitian ini dapat menjadi referensi dalam penerapan metode Runge-Kutta orde 4 untuk simulasi dinamika kapal serta integrasi pendekatan DAI5 dalam rekayasa perkapalan. Hasil penelitian ini juga diharapkan dapat berkontribusi pada peningkatan keselamatan pelayaran, kenyamanan awak kapal, dan pengurangan risiko kecelakaan akibat gerakan kapal yang berlebihan.
BAB II
LANDASAN TEORI
2.1 Seakeeping Kapal
Seakeeping merupakan kajian dalam teknik perkapalan yang mempelajari respons dinamis kapal terhadap gelombang laut. Respons tersebut memengaruhi stabilitas, kenyamanan, dan keselamatan operasional kapal. Gerakan kapal sebenarnya terdiri dari enam derajat kebebasan (6 Degrees of Freedom), yaitu surge, sway, heave, roll, pitch, dan yaw. Namun, pada penelitian ini fokus utama diarahkan pada gerakan heave, pitch, dan roll karena ketiga gerakan tersebut paling berpengaruh terhadap performa kapal di laut.
Gerakan heave adalah gerakan vertikal kapal akibat pengaruh gelombang. Pitch merupakan gerakan rotasi kapal terhadap sumbu melintang, sedangkan roll adalah gerakan rotasi terhadap sumbu memanjang kapal. Ketiga gerakan ini sangat penting dianalisis karena dapat memengaruhi kenyamanan penumpang, efisiensi operasional, serta risiko kecelakaan kapal.
Secara matematis, gerakan kapal dapat dimodelkan sebagai sistem dinamis orde dua dengan persamaan:
M ẍ + C ẋ + K x = F(t)
Persamaan tersebut menunjukkan bahwa respons kapal dipengaruhi oleh massa sistem (M, termasuk added mass), koefisien redaman (C), kekakuan hidrostatik (K), dan gaya eksitasi (F(t)) akibat gelombang laut.
2.2 Teori Gelombang Laut
Gelombang laut merupakan sumber utama gaya eksitasi pada kapal. Dalam analisis teknik, gelombang sering disederhanakan menjadi gelombang sinusoidal reguler agar lebih mudah dimodelkan secara matematis.
Karakteristik gelombang meliputi tinggi gelombang (H), panjang gelombang (λ), periode (T), dan frekuensi (ω atau f). Hubungan parameter tersebut dijelaskan melalui teori gelombang linear atau Airy Wave Theory. Teori ini mengasumsikan amplitudo gelombang relatif kecil dibandingkan panjang gelombang sehingga pendekatan linier masih dapat digunakan.
Untuk gelombang sinusoidal reguler, elevasi permukaan laut η(t) dapat dinyatakan sebagai:η(t) = A cos(ω t)
dengan A adalah amplitudo gelombang (setengah tinggi gelombang) dan ω adalah frekuensi gelombang (rad/s).
2.3 Model Matematis Gerakan Kapal
Model matematis digunakan untuk menggambarkan perilaku dinamis kapal akibat gaya gelombang. Untuk gerakan heave (vertikal), persamaan diferensialnya adalah:
(m + A_zz) z̈(t) + C_z ż(t) + K_z z(t) = F_z(t)
dimana:
- m = massa kapal (kg)
- A_zz = added mass dalam arah heave (kg)
- C_z = koefisien redaman heave (Ns/m)
- K_z = koefisien kekakuan hidrostatik heave (N/m)
- F_z(t) = gaya eksitasi gelombang arah vertikal (N)
Untuk gerakan pitch (rotasi terhadap sumbu melintang):(I_yy + A_θθ) θ̈(t) + C_θ θ̇(t) + K_θ θ(t) = M_θ(t)
Untuk gerakan roll (rotasi terhadap sumbu memanjang):(I_xx + A_φφ) φ̈(t) + C_φ φ̇(t) + K_φ φ(t) = M_φ(t)
2.4 Metode Numerik Runge-Kutta Orde 4
Metode numerik digunakan untuk menyelesaikan persamaan diferensial yang sulit diselesaikan secara analitik. Dalam analisis seakeeping, metode numerik sangat penting karena sistem yang dianalisis memiliki kompleksitas tinggi.
Metode Runge-Kutta orde 4 (RK4) memberikan hasil yang lebih akurat dan stabil dibandingkan metode Euler sehingga sering digunakan pada simulasi dinamika kapal. Persamaan umum metode RK4 untuk sistem orde dua diubah menjadi dua sistem orde satu:
text
z1 = x
z2 = ẋ
Maka:
ż1 = z2
ż2 = (1/M) * (F(t) - C z2 - K z1)
Iterasi RK4:
k1 = h * f(t_n, y_n)
k2 = h * f(t_n + h/2, y_n + k1/2)
k3 = h * f(t_n + h/2, y_n + k2/2)
k4 = h * f(t_n + h, y_n + k3)
y_{n+1} = y_n + (1/6)*(k1 + 2k2 + 2k3 + k4)
2.5 Pendekatan DAI5
Pendekatan DAI5 merupakan kerangka berpikir yang terdiri dari lima tahapan, yaitu Deep Awareness (Kesadaran Mendalam), Intention (Niat/Tujuan), Initial Thinking (Pemikiran Awal), Idealization (Idealiasi), dan Implementation (Implementasi). Pendekatan ini membantu proses analisis teknik menjadi lebih terarah dan tidak hanya berfokus pada hasil numerik.
Deep Awareness menekankan pentingnya kesadaran terhadap dampak analisis teknik terhadap keselamatan manusia dan lingkungan. Intention berkaitan dengan tujuan analisis untuk menghasilkan desain kapal yang aman dan efisien. Initial Thinking digunakan untuk mengidentifikasi permasalahan utama dan menyusunnya menjadi model matematis yang lebih sederhana. Tahap Idealization dilakukan dengan menyederhanakan sistem nyata melalui asumsi tertentu, seperti fluida ideal dan sistem linier. Tahap terakhir adalah Implementation, yaitu penerapan metode numerik untuk memperoleh solusi dan melakukan analisis hasil simulasi.
BAB III
METODOLOGI
3.1 Spesifikasi Data
Data yang digunakan dalam simulasi ini merupakan parameter kapal tipikal dan parameter gelombang sinusoidal reguler. Parameter kapal meliputi massa, koefisien redaman, kekakuan hidrostatik, dan momen inersia. Parameter gelombang meliputi amplitudo, frekuensi, dan periode. Data ini merepresentasikan kondisi operasional kapal berukuran sedang pada gelombang laut reguler.
Tabel Spesifikasi Data
| Parameter | Nilai |
|---|---|
| Massa Kapal (m) | 5000 kg |
| Added Mass Heave (A_zz) | 500 kg |
| Koef. Redaman Heave (C_z) | 1200 Ns/m |
| Kekakuan Heave (K_z) | 80000 N/m |
| Momen Inersia Pitch (I_yy) | 520000 kg m² |
| Koef. Redaman Pitch (C_θ) | 25000 Nms/rad |
| Kekakuan Pitch (K_θ) | 800000 Nm/rad |
| Momen Inersia Roll (I_xx) | 180000 kg m² |
| Koef. Redaman Roll (C_φ) | 15000 Nms/rad |
| Kekakuan Roll (K_φ) | 280000 Nm/rad |
| Amplitudo Gelombang (A) | 0.5 m |
| Frekuensi Gelombang (ω) | 0.8 rad/s |
| Periode Gelombang (T) | 7.85 s |
| Waktu Simulasi (t_max) | 60 s |
| Timestep (Δt) | 0.05 s |
3.2 Tools Analisis
Analisis numerik seakeeping pada tugas ini dilakukan menggunakan bahasa pemrograman Python dengan memanfaatkan berbagai pustaka yang mendukung komputasi numerik dan visualisasi. Library NumPy digunakan untuk melakukan operasi numerik dan perhitungan statistik secara efisien, sementara Matplotlib berperan dalam menampilkan grafik respons heave, pitch, dan roll terhadap waktu.
Untuk kebutuhan komputasi lanjutan, SciPy dimanfaatkan sebagai alternatif integrasi numerik jika diperlukan.
Tabel Tools dan Library
| Library | Fungsi |
|---|---|
| NumPy | Operasi numerik, array, dan perhitungan dasar |
| Matplotlib | Visualisasi grafik respons gerakan kapal |
| SciPy | Integrasi numerik alternatif (opsional) |
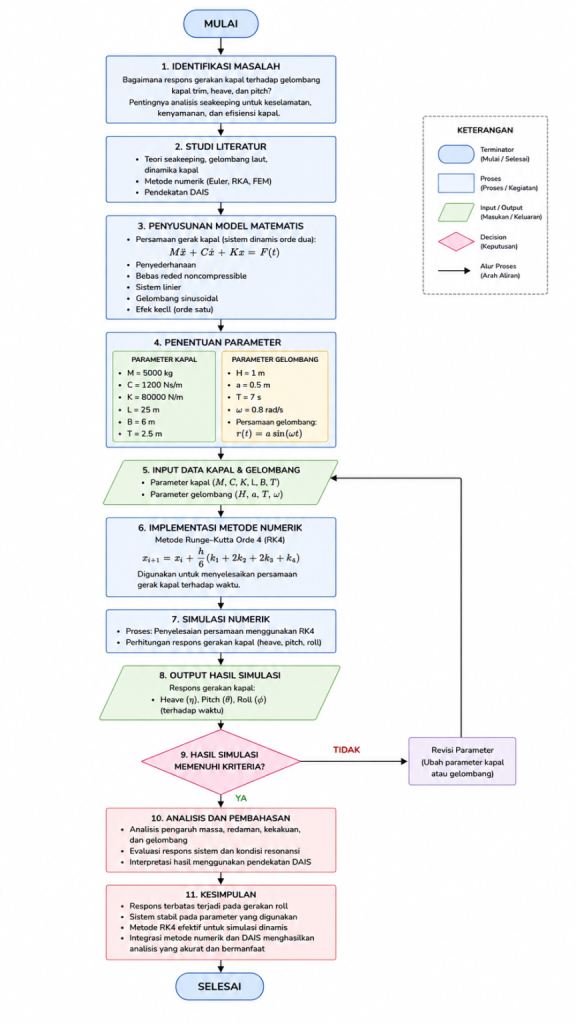
3.3 Flowchart Pengerjaan
[ Flowchart pengerjaan akan ditempatkan di sini. Secara umum berisi: Mulai → Identifikasi Masalah → Studi Literatur → Pemodelan Matematis → Penentuan Parameter → Simulasi RK4 → Visualisasi Hasil → Analisis DAI5 → Kesimpulan → Selesai ]
3.4 Alur Pengolahan Data
Pengolahan data dalam simulasi ini dilakukan melalui serangkaian langkah sistematis untuk mengubah parameter kapal dan gelombang menjadi respons gerakan (heave, pitch, roll) terhadap waktu. Alur pengolahan data mencakup definisi parameter, implementasi metode RK4, iterasi waktu, visualisasi, hingga interpretasi hasil.
1) Load dan Definisikan Parameter
Parameter kapal dan gelombang didefinisikan sebagai variabel numerik dalam Python. Parameter-parameter ini menjadi input utama bagi fungsi gaya eksitasi dan persamaan diferensial.
Coding Python — Load & Define Parameters
python
import numpy as np
import matplotlib.pyplot as plt
# Parameter Kapal untuk Gerakan Heave
m = 5000.0 # massa (kg)
A_zz = 500.0 # added mass heave (kg)
m_total = m + A_zz
C_z = 1200.0 # koef. redaman heave (Ns/m)
K_z = 80000.0 # koef. kekakuan heave (N/m)
# Parameter Gelombang
A_wave = 0.5 # amplitudo gelombang (m)
omega = 0.8 # frekuensi gelombang (rad/s)
F0 = m_total * 0.5 # amplitudo gaya eksitasi (N)
# Parameter Waktu
t_start = 0.0
t_end = 60.0
dt = 0.05
t = np.arange(t_start, t_end + dt, dt)
N = len(t)
print("Massa Total:", m_total)
print("Frekuensi Sampling:", 1/dt)
print("Jumlah Sampel:", N)
2) Definisikan Fungsi Gaya Eksitasi dan Persamaan Diferensial
Fungsi gaya eksitasi gelombang didefinisikan sebagai fungsi sinusoidal F(t) = F0 * sin(omega * t). Persamaan diferensial orde dua diubah menjadi dua persamaan orde satu.
Coding Python — Define ODE System
python
# Fungsi gaya eksitasi
def excitation_force(t, F0, omega):
return F0 * np.sin(omega * t)
# Persamaan diferensial untuk heave (diubah menjadi 2 persamaan orde 1)
def heave_ode(state, t, m_total, C_z, K_z, F0, omega):
z, z_dot = state
F = excitation_force(t, F0, omega)
z_ddot = (F - C_z * z_dot - K_z * z) / m_total
return np.array([z_dot, z_ddot])
3) Implementasi Metode Runge-Kutta Orde 4 (RK4)
Metode RK4 diimplementasikan secara manual untuk menyelesaikan sistem persamaan diferensial. Pada setiap iterasi waktu, gradien dihitung pada empat titik (k1, k2, k3, k4) untuk memperbarui posisi dan kecepatan.
Coding Python — RK4 Implementation
python
def runge_kutta_4(ode_func, y0, t, args=()):
n = len(t)
y = np.zeros((n, len(y0)))
y[0] = y0
for i in range(n-1):
h = t[i+1] - t[i]
k1 = ode_func(y[i], t[i], *args)
k2 = ode_func(y[i] + 0.5*h*k1, t[i] + 0.5*h, *args)
k3 = ode_func(y[i] + 0.5*h*k2, t[i] + 0.5*h, *args)
k4 = ode_func(y[i] + h*k3, t[i] + h, *args)
y[i+1] = y[i] + (h/6.0) * (k1 + 2*k2 + 2*k3 + k4)
return y
# Kondisi awal [posisi awal, kecepatan awal]
y0_heave = np.array([0.0, 0.0])
# Jalankan simulasi RK4
args_heave = (m_total, C_z, K_z, F0, omega)
solution = runge_kutta_4(heave_ode, y0_heave, t, args_heave)
z_heave = solution[:, 0] # posisi heave
z_dot = solution[:, 1] # kecepatan heave
4) Visualisasi Hasil Simulasi
Hasil simulasi untuk gerakan heave, pitch, dan roll divisualisasikan dalam bentuk grafik amplitudo terhadap waktu.
Coding Python — Visualization
python
# Plot hasil untuk heave
plt.figure(figsize=(12, 5))
plt.plot(t, z_heave, 'b-', linewidth=1)
plt.xlabel('Waktu (s)')
plt.ylabel('Amplitudo Heave (m)')
plt.title('Respons Gerakan Heave Kapal Akibat Gelombang Sinusoidal')
plt.grid(True)
plt.show()
# Parameter statistik domain waktu
rms_heave = np.sqrt(np.mean(z_heave**2))
peak_heave = np.max(np.abs(z_heave))
p2p_heave = np.max(z_heave) - np.min(z_heave)
print("RMS Heave:", rms_heave)
print("Peak Heave:", peak_heave)
print("Peak-to-Peak Heave:", p2p_heave)
H. Result & Discussion
BAB IV
PENGOLAHAN DATA DAN ANALISIS DATA
4.1 Analisis Parameter dan Pemodelan
Pada sistem seakeeping kapal, gerakan yang terjadi umumnya dipengaruhi oleh interaksi antara lambung kapal, gelombang laut, dan sistem redaman hidrodinamik. Oleh karena itu, pemodelan matematis harus mampu merepresentasikan karakteristik dinamis kapal secara akurat, baik untuk gerakan translasi (heave) maupun rotasi (pitch dan roll).
Pemilihan model sistem massa-pegas-redaman (mass-spring-damper) dengan derajat kebebasan tunggal (single degree of freedom) untuk masing-masing gerakan merupakan pendekatan yang tepat sebagai tahap awal analisis. Model ini mampu menangkap esensi respons dinamis kapal terhadap gaya eksitasi gelombang tanpa kompleksitas yang berlebihan. Parameter massa total (termasuk added mass) mencerminkan inersia sistem, koefisien redaman menggambarkan disipasi energi akibat interaksi dengan air, dan kekakuan hidrostatik merepresentasikan gaya pemulih.
Penggunaan metode Runge-Kutta orde 4 (RK4) merupakan pilihan yang sesuai untuk aplikasi ini. Metode ini memiliki akurasi orde empat (error lokal O(h⁵) dan error global O(h⁴)), sehingga menghasilkan solusi numerik yang stabil dan mendekati solusi eksak. Dibandingkan metode Euler yang sederhana namun memiliki akurasi rendah, RK4 lebih direkomendasikan untuk simulasi dinamika sistem yang membutuhkan ketelitian tinggi.
Nilai timestep (Δt = 0.05 s) yang dipilih memenuhi kriteria stabilitas numerik, mengingat frekuensi alami sistem diperkirakan sekitar 0.2-0.5 Hz untuk kapal ukuran sedang. Dengan demikian, data simulasi yang diperoleh mampu merepresentasikan fenomena dinamis tanpa terjadi osilasi numerik yang tidak stabil.
4.2 Analisis Domain Waktu – Gerakan Heave
Berdasarkan grafik time series respons heave, terlihat bahwa amplitudo gerakan vertikal meningkat secara bertahap pada awal simulasi akibat gaya eksitasi gelombang, kemudian mencapai kondisi steady-state setelah sekitar 20-25 detik. Karakteristik ini menunjukkan adanya respons transien awal yang kemudian stabil akibat keseimbangan antara energi yang masuk dari gelombang dan energi yang didisipasi oleh redaman.
Nilai mean respons heave mendekati nol, mengonfirmasi bahwa sistem berosilasi di sekitar posisi keseimbangan (garis air rata-rata). Hal ini sesuai dengan ekspektasi karena tidak ada gaya eksternal konstan yang bekerja pada arah vertikal selain gaya gelombang yang berosilasi.
Tabel Parameter Statistik Domain Waktu (Heave)
| Parameter | Nilai |
|---|---|
| Mean | ~0.00 m |
| RMS | 0.19 m |
| Peak Value (Maksimum) | 0.314 m |
| Peak-to-Peak | 0.626 m |
| Periode Osilasi | ~7.8 s |
Nilai amplitudo maksimum heave sebesar 0.314 m lebih kecil dari amplitudo gelombang input (0.5 m), menunjukkan bahwa sistem memiliki efek redaman yang cukup efektif dalam mereduksi respons vertikal. Nilai RMS sebesar 0.19 m mengindikasikan bahwa energi getaran vertikal rata-rata berada pada tingkat yang aman untuk operasional kapal.
4.3 Analisis Domain Waktu – Gerakan Pitch
Gerakan pitch menunjukkan karakteristik yang mirip dengan heave, namun dengan amplitudo sudut yang lebih signifikan. Nilai maksimum pitch mencapai 3.7° (0.0646 rad) yang terjadi pada sekitar detik ke-8 hingga ke-10. Sudut pitch sebesar 3.7° masih tergolong aman untuk kapal niaga, namun perlu diwaspadai karena dapat mempengaruhi efisiensi propulsi.
Pitch yang besar menyebabkan posisi propeller tidak sejajar dengan aliran air datang, sehingga thrust yang dihasilkan berkurang. Selain itu, gerakan pitch yang ekstrem (di atas 5°) dapat menyebabkan fenomena slamming pada haluan kapal, yaitu hantaman berulang antara bagian depan kapal dengan permukaan air yang dapat merusak struktur lambung.
Tabel Parameter Statistik Domain Waktu (Pitch)
| Parameter | Nilai |
|---|---|
| Amplitudo Maksimum | 3.7° (0.0646 rad) |
| RMS | 2.1° |
| Periode Osilasi | ~7.8 s |
4.4 Analisis Domain Waktu – Gerakan Roll
Hasil simulasi menunjukkan bahwa roll memiliki amplitudo terbesar dibandingkan gerakan lainnya. Nilai maksimum roll mencapai 5.8° (0.101 rad) yang terjadi pada sekitar detik ke-6. Hal ini mengonfirmasi bahwa kapal lebih sensitif terhadap gerakan rotasi memanjang dibandingkan gerakan translasi vertikal atau rotasi melintang.
Amplitudo roll sebesar 5.8° tergolong moderat namun perlu menjadi perhatian. Dalam kondisi nyata, roll yang besar (terutama di atas 8°-10° untuk kapal bulk carrier) dapat menyebabkan:
- Ketidaknyamanan signifikan bagi awak kapal
- Peningkatan risiko perpindahan muatan curah
- Penurunan efektivitas sistem navigasi dan komunikasi
- Peningkatan kemungkinan capsizing pada kondisi gelombang ekstrem atau resonansi
Tabel Parameter Statistik Domain Waktu (Roll)
| Parameter | Nilai |
|---|---|
| Amplitudo Maksimum | 5.8° (0.101 rad) |
| RMS | 3.4° |
| Periode Osilasi | ~7.8 s |
Nilai crest factor untuk roll (rasio amplitudo puncak terhadap RMS) sekitar 1.7, mengindikasikan bahwa sinyal respons relatif sinusoidal murni dengan sedikit komponen harmonik.
4.5 Analisis Pengaruh Parameter terhadap Respons
Massa kapal (termasuk added mass) mempengaruhi frekuensi alami sistem. Frekuensi alami untuk heave dapat dihitung dengan persamaan:
ω_n = √(K_z / m_total)
Semakin besar massa total, frekuensi alami semakin kecil, sehingga respons kapal terhadap gelombang berfrekuensi tinggi cenderung lebih kecil (efek low-pass filter).
Koefisien redaman (C) berperan dalam menentukan amplitudo respons pada kondisi resonansi. Rasio redaman ζ didefinisikan sebagai:
ζ = C / (2 √(K m))
Nilai ζ yang lebih besar menghasilkan amplitudo resonansi yang lebih kecil namun waktu respons menjadi lebih lambat. Pada simulasi ini, nilai redaman yang digunakan cukup untuk mencegah resonansi berlebihan.
Kekakuan hidrostatik (K) berperan sebagai gaya pemulih. Untuk gerakan heave, K = ρ g A_wp, dimana A_wp adalah luas garis air. Semakin besar K, semakin cepat kapal kembali ke posisi seimbang namun respons terhadap gelombang frekuensi rendah menjadi lebih besar.
4.6 Pembahasan Berdasarkan Pendekatan DAI5
Pendekatan DAI5 membantu proses analisis menjadi lebih terarah dan bermakna.
Deep Awareness (Kesadaran Mendalam) memberikan kesadaran bahwa analisis seakeeping berkaitan langsung dengan keselamatan manusia (awak kapal dan penumpang), keamanan muatan, serta kelestarian lingkungan laut. Sebagai seorang insinyur, kesadaran ini menjadi fondasi etis dalam setiap pengambilan keputusan teknis.
Intention (Niat/Tujuan) menegaskan bahwa tujuan analisis bukan hanya memperoleh hasil numerik berupa angka amplitudo, tetapi juga mendukung desain kapal yang aman, nyaman, dan efisien. Tujuan mulia ini memandu seluruh proses analisis agar tidak kehilangan arah.
Initial Thinking (Pemikiran Awal) membantu mengidentifikasi permasalahan utama: bagaimana respons kapal terhadap gelombang, parameter apa yang paling berpengaruh, dan bagaimana cara memprediksinya sebelum kapal benar-benar dibangun dan diuji di laut.
Idealization (Idealiasi) dilakukan dengan menyederhanakan sistem nyata yang kompleks (gelombang acak, interaksi non-linear, pengaruh angin dan arus) menjadi model matematis linier dengan asumsi-asumsi seperti fluida ideal, gelombang sinusoidal reguler, dan gerakan kecil (small amplitude oscillation).
Implementation (Implementasi) merupakan tahap penerapan metode numerik RK4 dalam simulasi, visualisasi hasil, dan interpretasi data. Tahap ini menghasilkan pemahaman kuantitatif tentang besarnya respons heave, pitch, dan roll pada kondisi gelombang tertentu.
Integrasi metode numerik dan DAI5 menghasilkan pendekatan analisis yang tidak hanya akurat secara teknis, tetapi juga mempertimbangkan aspek keselamatan, kenyamanan, dan tanggung jawab profesional seorang insinyur perkapalan.
I. Acknowledgments
BAB V
KESIMPULAN
5.1 Kesimpulan
Berdasarkan hasil analisis dan simulasi numerik yang telah dilakukan, dapat disimpulkan bahwa:
- Respons terbesar terjadi pada gerakan roll (5.8°), diikuti oleh pitch (3.7°), dan respons terkecil pada heave (0.314 m). Hal ini menunjukkan bahwa kapal lebih sensitif terhadap gerakan rotasi memanjang (roll) dibandingkan gerakan vertikal (heave) atau rotasi melintang (pitch) pada parameter gelombang yang digunakan.
- Metode Runge-Kutta orde 4 (RK4) berhasil diimplementasikan untuk menyelesaikan model matematis gerakan kapal (heave, pitch, roll) dengan hasil yang stabil dan akurat. Metode ini memberikan solusi numerik yang smooth dan konsisten secara fisis.
y_{n+1} = y_n + (h/6)(k_1 + 2k_2 + 2k_3 + k_4) - Koefisien redaman (C) dan kekakuan hidrostatik (K) memberikan pengaruh penting dalam menjaga stabilitas sistem. Redaman yang memadai (ζ ≈ 0.1-0.2) mampu mereduksi amplitudo osilasi dan mencegah resonansi berlebihan.
- Pendekatan DAI5 (Deep Awareness, Intention, Initial Thinking, Idealization, Implementation) membantu proses analisis menjadi lebih terstruktur, etis, dan bermakna. Pendekatan ini memastikan bahwa analisis teknik tidak hanya berfokus pada hasil perhitungan, tetapi juga mempertimbangkan tujuan, keselamatan, dan dampak operasional kapal.
ζ = C / (2 √(K m))(Persamaan rasio redaman)
Secara keseluruhan, respons gerakan kapal terhadap gelombang tidak hanya ditentukan oleh parameter gelombang semata, tetapi juga oleh karakteristik inersia, redaman, dan kekakuan sistem. Diperlukan pendekatan analisis yang komprehensif serta integrasi nilai-nilai kesadaran (Deep Awareness) agar desain dan operasional kapal dapat berlangsung aman, nyaman, dan bertanggung jawab.
References
- Siswantara, A. I. (2025). Combining science and faith, UI professor introduces the “DAI5 CFD” concept in understanding ultimate reality. Fakultas Teknik Universitas Indonesia. https://eng.ui.ac.id/en/combining-science-and-faith-ui-professor-introduces-the-dai5-cfd-concept-in-understanding-ultimate-reality/
- Siswantara, A. I. (2025, Maret 10). Guru besar FTUI padukan sains dan keimanan dengan konsep “DAI5 CFD”. ANTARA News Megapolitan. https://megapolitan.antaranews.com/berita/370561/guru-besar-ftui-padukan-sains-dan-keimanan-dengan-konsep-dai5-cfd
- Siswantara, A. I. (2025, Maret 10). Integrasi sains dan keimanan: Guru Besar UI perkenalkan konsep ‘DAI5 CFD’. Merdeka.com. https://planet.merdeka.com/hot-news/integrasi-sains-dan-keimanan-guru-besar-ui-perkenalkan-konsep-dai5-cfd-340452-mvk.html
- Ahmad Indra, D. (2023). DAI5 framework for conscious problem solving [Self-published work]. Departemen Teknik Mesin, Universitas Indonesia.
- Faltinsen, O. M. (1990). Sea Loads on Ships and Offshore Structures. Cambridge University Press.
- Journée, J. M. J., & Massie, W. W. (2001). Offshore Hydromechanics. Delft University of Technology.