A. Project Title
Kegagalan Operasional pada Kapal Bulk Carrier akibat Kegagalan Condition-Based Monitoring (CBM)
B. Author Complete Name
Farhan Ubaidillah
NPM 2406431580
C. Affiliation
Departemen Teknik Perkapalan
Fakultas Teknik Universitas Indonesia
Mata Kuliah Metode Numerik – 03
D. Abstract
Kapal bulk carrier memiliki peran penting dalam distribusi komoditas curah sehingga keandalan sistem propulsi menjadi faktor utama dalam menjamin keselamatan dan kelancaran operasional kapal. Sistem propulsi yang terdiri atas mesin utama, poros, bearing, dan propeller rentan mengalami kerusakan apabila tidak dipantau secara efektif. Seiring perkembangan teknologi perawatan, Condition-Based Monitoring (CBM) telah diterapkan sebagai pendekatan predictive maintenance untuk memantau kondisi peralatan secara real-time melalui parameter seperti getaran, temperatur, tekanan, dan performa mesin. Namun, implementasi CBM di kapal masih menghadapi berbagai kendala, seperti kurang optimalnya analisis data, keterbatasan penerapan metode numerik, serta kesalahan interpretasi oleh operator. Penelitian ini bertujuan untuk menganalisis pengaruh kegagalan implementasi CBM terhadap keandalan operasional kapal bulk carrier. Metode yang digunakan berupa kajian analitis terhadap hubungan antara pemantauan kondisi, pengolahan data berbasis metode numerik, dan pengambilan keputusan teknis. Hasil analisis menunjukkan bahwa kegagalan dalam pemanfaatan data CBM dapat menyebabkan indikasi awal kerusakan, seperti peningkatan getaran poros dan temperatur bearing, tidak terdeteksi secara tepat sehingga berpotensi berkembang menjadi kegagalan sistem propulsi. Oleh karena itu, optimalisasi implementasi CBM dan peningkatan kemampuan analisis data menjadi faktor penting dalam meningkatkan keselamatan, keandalan, serta efisiensi operasional kapal bulk carrier.
Kata Kunci: Bulk carrier, Condition-Based Monitoring (CBM), predictive maintenance, sistem propulsi, metode numerik, keandalan operasional, monitoring kondisi.
E. Author Declaration
1. Deep Awareness of I
Dalam penelitian ini, saya menyadari bahwa ilmu pengetahuan dan kemampuan analisis yang dimiliki manusia merupakan anugerah dari Tuhan Yang Maha Esa yang harus digunakan secara bertanggung jawab. Melalui pendekatan Deep Awareness of I, saya memahami bahwa bidang engineering tidak hanya berfokus pada aspek teknis dan perhitungan, tetapi juga pada upaya menjaga keselamatan, keandalan, dan keberlanjutan sistem yang dirancang untuk mendukung kehidupan manusia.
Kajian mengenai kegagalan implementasi Condition-Based Monitoring (CBM) pada kapal bulk carrier tidak hanya dipandang sebagai analisis data operasional dan metode numerik semata, tetapi juga sebagai bentuk kontribusi dalam meningkatkan keselamatan pelayaran serta mencegah kerugian akibat kerusakan peralatan yang dapat dideteksi sejak dini. Dengan pemanfaatan teknologi pemantauan kondisi yang tepat, operasional kapal dapat berlangsung lebih andal, efisien, dan berkelanjutan sehingga memberikan manfaat bagi industri maritim dan lingkungan.
2. Intention of the Project Activity
Tujuan dari penelitian ini adalah untuk memahami hubungan antara penerapan Condition-Based Monitoring (CBM), analisis data kondisi peralatan, dan keandalan operasional sistem propulsi kapal bulk carrier melalui pendekatan metode numerik. Penelitian ini bertujuan untuk mengidentifikasi bagaimana kegagalan dalam proses pemantauan, pengolahan data, dan interpretasi kondisi peralatan dapat mempengaruhi performa serta keselamatan operasional kapal.
Selain itu, penelitian ini juga bertujuan untuk melatih pola pikir engineering yang sistematis, kritis, dan berbasis data dalam menyelesaikan permasalahan teknis yang kompleks. Melalui kajian ini, diharapkan dapat diperoleh pemahaman yang lebih baik mengenai pentingnya pemanfaatan teknologi monitoring kondisi dan metode numerik sebagai dasar pengambilan keputusan perawatan yang efektif pada sistem propulsi kapal.
F. Introduction
BAB I
PENDAHULUAN
1.1 Latar Belakang
Kapal bulk carrier merupakan salah satu jenis kapal niaga yang berperan penting dalam distribusi komoditas curah seperti batubara, bijih nikel, dan bijih besi. Dalam operasionalnya, kapal ini sangat bergantung pada keandalan sistem propulsi, khususnya mesin utama, sistem poros (shaft system), serta komponen pendukung seperti bearing dan propeller. Kegagalan pada salah satu komponen tersebut dapat menyebabkan gangguan operasional yang signifikan, bahkan berpotensi membahayakan keselamatan kapal.
Seiring dengan perkembangan teknologi maritim, pendekatan perawatan telah bergeser dari corrective maintenance menuju predictive maintenance, salah satunya melalui penerapan Condition-Based Monitoring (CBM). Sistem CBM memungkinkan pemantauan kondisi peralatan secara real-time melalui parameter seperti getaran, temperatur, tekanan, dan performa mesin. Data yang diperoleh kemudian dianalisis untuk mendeteksi gejala awal kerusakan sehingga tindakan pencegahan dapat dilakukan sebelum terjadi kegagalan.
Namun, dalam praktiknya, implementasi CBM di kapal seringkali belum optimal. Meskipun data operasional tersedia, kegagalan masih dapat terjadi akibat kurangnya analisis yang mendalam, keterbatasan pemanfaatan metode numerik, serta kesalahan dalam interpretasi data oleh operator. Kondisi ini menyebabkan potensi kerusakan yang sebenarnya dapat dideteksi sejak dini justru berkembang menjadi kegagalan operasional yang lebih serius.
Oleh karena itu, diperlukan kajian lebih lanjut mengenai bagaimana kegagalan dalam implementasi Condition-Based Monitoring dapat mempengaruhi keandalan operasional kapal bulk carrier. Analisis ini penting untuk memahami hubungan antara pemantauan kondisi, pengolahan data berbasis metode numerik, dan pengambilan keputusan teknis, guna meningkatkan keselamatan dan efisiensi operasional kapal.Pada kapal bulk carrier, kegagalan sistem propulsi seperti meningkatnya getaran poros, kenaikan temperatur bearing, atau penurunan efisiensi mesin seringkali merupakan indikasi awal adanya masalah. Tanpa penerapan CBM yang efektif, indikasi tersebut dapat terabaikan, sehingga berujung pada kerusakan komponen, peningkatan biaya perbaikan, serta gangguan jadwal pelayaran.
1.2 Rumusan Masalah
- Bagaimana peran Condition-Based Monitoring (CBM) dalam menjaga keandalan operasional sistem propulsi kapal bulk carrier?
- Faktor-faktor apa saja yang menyebabkan kegagalan implementasi Condition-Based Monitoring pada kapal bulk carrier?
- Bagaimana pengaruh kegagalan implementasi Condition-Based Monitoring terhadap kinerja dan keandalan sistem propulsi kapal?
- Bagaimana metode numerik dapat digunakan untuk menganalisis data kondisi peralatan guna mendeteksi potensi kegagalan sejak dini?
- Upaya apa yang dapat dilakukan untuk meningkatkan efektivitas penerapan Condition-Based Monitoring pada kapal bulk carrier?
1.3 Tujuan Analisis
- Menganalisis peran Condition-Based Monitoring (CBM) dalam mendukung keandalan operasional sistem propulsi kapal bulk carrier.
- Mengidentifikasi faktor-faktor yang menyebabkan kegagalan implementasi Condition-Based Monitoring pada kapal bulk carrier.
- Menganalisis dampak kegagalan implementasi Condition-Based Monitoring terhadap performa dan keandalan sistem propulsi kapal.
- Mengkaji penerapan metode numerik dalam pengolahan dan analisis data monitoring kondisi peralatan.
- Memberikan rekomendasi untuk meningkatkan efektivitas penerapan Condition-Based Monitoring guna mendukung keselamatan dan efisiensi operasional kapal.
1.4 Manfaat Analisis
Penelitian ini diharapkan dapat memberikan pemahaman mengenai pentingnya penerapan Condition-Based Monitoring (CBM) dalam menjaga keandalan operasional sistem propulsi kapal bulk carrier. Selain itu, penelitian ini dapat menjadi referensi dalam penerapan metode numerik untuk menganalisis data kondisi peralatan, mendeteksi potensi kerusakan sejak dini, serta mendukung pengambilan keputusan perawatan yang lebih efektif. Hasil penelitian ini juga diharapkan dapat berkontribusi pada peningkatan keselamatan, efisiensi operasional, dan pengurangan risiko kegagalan sistem yang dapat mengganggu aktivitas pelayaran.
BAB II
LANDASAN TEORI
2.1 Kapal Bulk Carrier
Kapal bulk carrier merupakan salah satu jenis kapal niaga yang dirancang khusus untuk mengangkut muatan curah (bulk cargo) dalam jumlah besar tanpa kemasan individual. Muatan yang diangkut umumnya berupa bahan mentah seperti batubara, bijih besi, bijih nikel, gandum, dan semen. Kapal ini memiliki peran yang sangat penting dalam rantai logistik global, terutama dalam mendukung industri pertambangan, energi, dan manufaktur.
Secara konstruksi, kapal bulk carrier memiliki desain yang sederhana namun kuat, dengan ruang muat (cargo hold) yang luas dan dilengkapi dengan penutup palka (hatch cover). Struktur lambungnya dirancang untuk menahan beban muatan curah yang berat serta distribusi beban yang tidak selalu merata. Selain itu, kapal ini biasanya dilengkapi dengan sistem ballast untuk menjaga stabilitas selama pelayaran, baik dalam kondisi bermuatan maupun kosong.
Berdasarkan ukurannya, kapal bulk carrier dapat diklasifikasikan menjadi beberapa jenis, antara lain:
- Handysize (10.000 – 40.000 DWT)
- Handymax / Supramax (40.000 – 60.000 DWT)
- Panamax (60.000 – 80.000 DWT)
- Capesize (> 80.000 DWT)
Klasifikasi ini didasarkan pada kapasitas angkut (Deadweight Tonnage / DWT) serta keterbatasan jalur pelayaran seperti Terusan Panama dan Terusan Suez.
Dalam operasionalnya, kapal bulk carrier sangat bergantung pada efisiensi sistem propulsi untuk menjamin kelancaran distribusi muatan. Sistem propulsi tersebut terdiri dari mesin utama, sistem poros (shaft system), bearing, dan propeller yang bekerja secara terintegrasi untuk menghasilkan gaya dorong (thrust). Mengingat kapal ini sering beroperasi dalam perjalanan jarak jauh dengan beban penuh, maka keandalan sistem propulsi menjadi faktor krusial.
2.2 Sistem Propulsi Kapal
Sistem propulsi kapal merupakan sistem utama yang berfungsi menghasilkan gaya dorong (thrust) sehingga kapal dapat bergerak di air. Pada kapal bulk carrier, sistem ini umumnya terdiri atas mesin diesel sebagai sumber tenaga, sistem poros (shaft system) sebagai media transmisi daya, bearing sebagai penopang poros, dan propeller sebagai penghasil gaya dorong. Seluruh komponen tersebut bekerja secara terintegrasi untuk mengubah energi dari mesin menjadi gerakan kapal.
Dalam operasionalnya, sistem propulsi menerima berbagai jenis beban, seperti beban puntir, beban lentur, gaya aksial, dan getaran yang dapat memengaruhi keandalan komponen. Kondisi tersebut dapat menyebabkan berbagai permasalahan, seperti misalignment poros, ketidakseimbangan sistem rotasi, keausan bearing, kerusakan propeller akibat kavitasi, serta overheating. Jika tidak terdeteksi sejak dini, kerusakan tersebut dapat berkembang menjadi kegagalan yang lebih serius dan mengganggu operasional kapal.
Untuk menjaga keandalan sistem propulsi, Condition-Based Monitoring (CBM) diterapkan melalui pemantauan parameter seperti getaran, temperatur, dan tekanan. Metode ini memungkinkan deteksi dini terhadap perubahan kondisi peralatan sehingga tindakan perawatan dapat dilakukan sebelum terjadi kegagalan. Namun, keberhasilan implementasi CBM sangat bergantung pada kualitas data yang diperoleh, metode analisis yang digunakan, serta kemampuan operator dalam menginterpretasikan hasil pemantauan untuk mendukung pengambilan keputusan yang tepat.
2.3 Kegagalan Pada Sistem Propulsi
Kegagalan sistem propulsi kapal terjadi ketika satu atau lebih komponen tidak mampu menjalankan fungsinya secara optimal sehingga menyebabkan penurunan kinerja hingga gangguan operasional kapal. Pada kapal bulk carrier, kegagalan ini umumnya terjadi secara bertahap akibat degradasi komponen yang dipengaruhi oleh beban mekanis, kondisi operasi, dan lingkungan laut. Komponen yang paling sering mengalami kegagalan meliputi sistem poros, bearing, propeller, dan mesin utama, yang masing-masing dapat mengalami kerusakan seperti fatigue, keausan, overheating, kavitasi, korosi, maupun penurunan performa mesin.
Berbagai faktor dapat memicu kegagalan sistem propulsi, antara lain overload, misalignment, unbalance, pelumasan yang tidak memadai, korosi akibat lingkungan laut, serta kesalahan operasional dan perawatan. Kerusakan tersebut umumnya berkembang melalui mekanisme seperti kelelahan material (fatigue), keausan (wear), korosi (corrosion), dan tegangan termal (thermal stress). Sebelum terjadi kegagalan total, sistem biasanya menunjukkan gejala awal berupa peningkatan getaran, kenaikan temperatur bearing, munculnya suara tidak normal, serta penurunan efisiensi propeller dan performa mesin.
Dampak kegagalan sistem propulsi dapat berupa meningkatnya biaya perbaikan, downtime operasional, penurunan efisiensi bahan bakar, hingga risiko kecelakaan pelayaran. Oleh karena itu, penerapan Condition-Based Monitoring (CBM) menjadi penting untuk mendeteksi perubahan kondisi sistem sejak dini melalui pemantauan parameter seperti getaran, temperatur, dan tekanan. Namun, efektivitas CBM sangat bergantung pada kualitas data, metode analisis, dan kemampuan operator dalam menginterpretasikan hasil pemantauan sehingga potensi kerusakan dapat diidentifikasi sebelum berkembang menjadi kegagalan yang lebih serius.
2.4 Condition Based Monitoring (CBM)
Condition-Based Monitoring (CBM) merupakan metode pemeliharaan yang berfokus pada kondisi aktual peralatan melalui pemantauan parameter operasional secara langsung. Berbeda dengan corrective maintenance dan preventive maintenance, CBM memungkinkan deteksi dini terhadap potensi kerusakan berdasarkan data kondisi nyata peralatan. Pada sistem propulsi kapal bulk carrier, penerapan CBM sangat penting untuk menjaga keandalan operasi karena sistem bekerja secara kontinu dalam kondisi beban tinggi dan lingkungan yang kompleks.
Prinsip kerja CBM meliputi proses pemantauan kondisi secara real-time menggunakan sensor, pengumpulan data, pengolahan sinyal, analisis kondisi, diagnosis kerusakan, hingga pengambilan keputusan pemeliharaan. Pendekatan ini mengubah strategi perawatan dari yang bersifat reaktif menjadi prediktif sehingga kerusakan dapat diantisipasi sebelum berkembang menjadi kegagalan yang lebih serius.
Dalam sistem propulsi kapal, parameter yang umum dipantau meliputi getaran, temperatur, tekanan, kecepatan putar (RPM), dan kebisingan. Data dari parameter tersebut kemudian dianalisis menggunakan berbagai metode seperti vibration analysis, Fast Fourier Transform (FFT), Root Mean Square (RMS), dan trend analysis untuk mengidentifikasi anomali serta mendeteksi gejala awal kerusakan pada komponen sistem propulsi.
Penerapan CBM memberikan manfaat berupa peningkatan keandalan sistem, pengurangan downtime, optimalisasi biaya perawatan, dan perpanjangan umur komponen. Namun, efektivitasnya sangat bergantung pada kualitas data, metode analisis yang digunakan, serta kemampuan operator dalam menginterpretasikan hasil pemantauan. Kegagalan dalam implementasi CBM dapat menyebabkan potensi kerusakan tidak terdeteksi sejak dini sehingga meningkatkan risiko gangguan operasional dan menurunkan keandalan sistem propulsi kapal.
F. Introduction
BAB III
METODOLOGI
3.1 Spesifikasi Data
Data yang digunakan dalam analisis ini merupakan sinyal getaran (vibration time series) dari sistem propulsi kapal pada kondisi berbeban (loaded). Data diperoleh dari pengukuran menggunakan akselerometer yang ditempatkan pada lokasi propeller. Pemilihan lokasi propeller didasarkan pada pertimbangan bahwa area tersebut merupakan titik kritis dimana gaya eksitasi dari baling-baling dan pembebanan transversal dari sistem hidrolik paling dominan, sehingga sinyal getaran yang terekam memiliki kualitas terbaik untuk analisis lebih lanjut. Pengukuran dilakukan pada saat sistem beroperasi dengan kecepatan poros 60 rpm, yang merupakan salah satu dari lima variasi kecepatan yang diuji dalam penelitian eksperimental. Kondisi berbeban (loaded) dipilih karena pada kondisi ini respons getaran menunjukkan pertumbuhan amplitudo yang lebih besar dan transien yang lebih jelas dibandingkan kondisi tanpa beban (idling), sehingga lebih sesuai untuk mempelajari fenomena forced vibration with damping.
Tabel Spesifikasi Data
| Parameter | Nilai |
|---|---|
| Nama File | STD_051.csv |
| Jenis Data | Time Series Getaran |
| Jumlah Sampel | 2000 data |
| Interval Waktu (dt) | 0.005 s |
| Frekuensi Sampling | 200 Hz |
| Sensor | Accelerometer |
| Lokasi Pengukuran | Propeller / Tail Bearing |
| Kondisi Operasi | Loaded |
| Kecepatan Poros | 60 rpm |
| Variabel Utama | Time dan Acceleration |
3.2 Tools Analisis
Analisis data getaran pada tugas ini dilakukan menggunakan bahasa pemrograman Python dengan memanfaatkan berbagai pustaka yang mendukung komputasi numerik dan pemrosesan sinyal. Library NumPy digunakan untuk melakukan operasi numerik dan perhitungan statistik secara efisien, sementara Pandas berperan dalam membaca serta mengelola data dari file berformat CSV maupun Excel.
Untuk kebutuhan visualisasi, Matplotlib digunakan dalam menampilkan grafik time series dan spektrum FFT, sehingga pola sinyal dapat diamati dengan lebih jelas. Selain itu, SciPy dimanfaatkan untuk pemrosesan sinyal lanjutan, meliputi perhitungan FFT, deteksi puncak (find_peaks), penerapan filter Butterworth, transformasi Hilbert untuk analisis amplop, serta curve fitting eksponensial dalam estimasi parameter redaman.
Tabel Tools dan Library
| Library | Fungsi |
|---|---|
| NumPy | Operasi numerik dan statistik |
| Pandas | Membaca dan mengelola data |
| Matplotlib | Visualisasi grafik |
| SciPy Signal | FFT, filtering, Hilbert transform |
| SciPy Optimize | Curve fitting estimasi damping |
3.3 Flowchart Pengerjaan
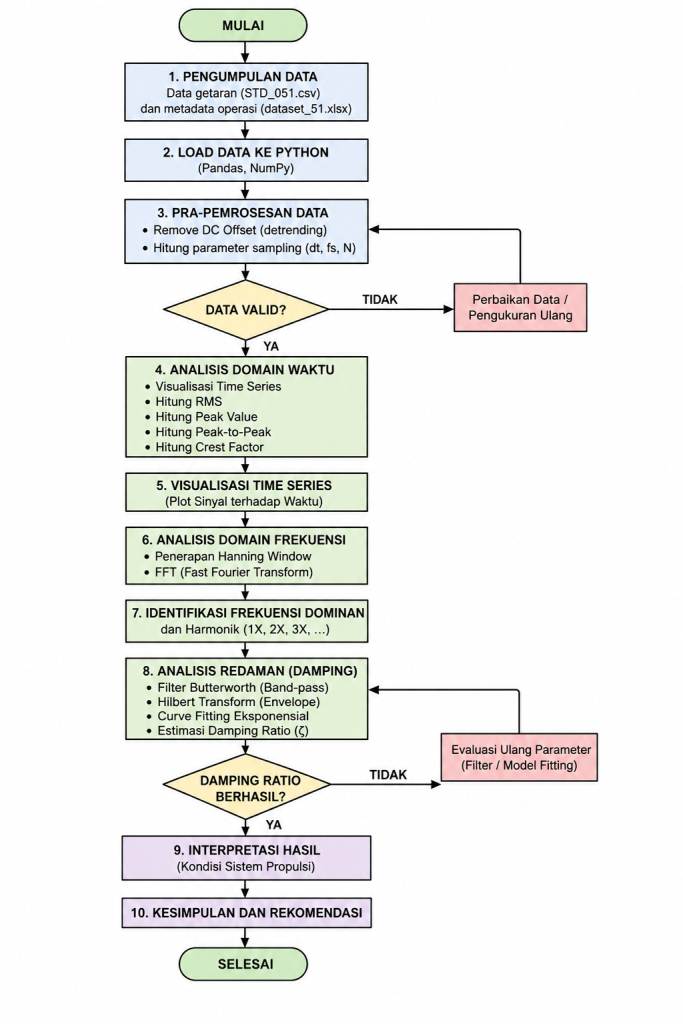
3.4 Alur Pengolahan Data
Pengolahan data sinyal getaran dalam analisis ini dilakukan melalui serangkaian langkah sistematis untuk mengubah data mentah (raw signal) menjadi informasi yang bermakna tentang karakteristik getaran sistem. Alur pengolahan data mencakup pra-pemrosesan, analisis domain waktu, analisis domain frekuensi, estimasi parameter redaman, hingga interpretasi hasil.
1) Load Data
Data getaran dimuat dari file STD_051.csv yang berisi dua kolom utama: time_s (waktu dalam detik) dan acceleration (nilai akselerasi dalam m/s²). File ini memiliki 2000 baris data dengan interval waktu 0.005 detik. Selain itu, file dataset_51.xlsx dimuat untuk memperoleh parameter operasi seperti kecepatan poros (60 rpm), rasio redaman (0.045), konten harmonik (1X+3X), dan informasi lainnya.
Coding Python — Load Data
import pandas as pd
import numpy as np
# Load vibration signal
df = pd.read_csv('STD_051.csv')
# Load operational dataset
meta = pd.read_excel('dataset_51.xlsx')
# Extract variables
time = df['time_s'].values
acc = df['acceleration'].values
# Display first rows
print(df.head())
print(meta.head())2) Pra-Pemrosesan
Tahap pra-pemrosesan bertujuan untuk meningkatkan kualitas data dengan menghilangkan komponen yang tidak diinginkan sebelum dilakukan analisis lebih lanjut.
Salah satu langkah penting dalam tahap ini adalah penghilangan DC offset (DC removal), yaitu dengan menghitung nilai rata-rata dari sinyal mentah, kemudian mengurangkannya dari setiap titik data. Proses ini membuat sinyal berosilasi di sekitar garis nol, sehingga meningkatkan akurasi dalam analisis Fast Fourier Transform (FFT) maupun perhitungan parameter statistik.
Perhitungan parameter dasar dilakukan untuk memperoleh karakteristik utama dari data sinyal yang akan dianalisis. Parameter-parameter tersebut meliputi frekuensi sampling (fs), interval waktu (dt), dan jumlah sampel (N), yang semuanya dihitung langsung dari data yang tersedia.
Coding Python — Preprocessing
# Remove DC offset
acc_mean = np.mean(acc)
acc_detrended = acc - acc_mean
# Sampling parameters
dt = time[1] - time[0]
fs = 1 / dt
N = len(acc_detrended)
print("Mean:", acc_mean)
print("Sampling Frequency:", fs)
print("Number of Samples:", N)3) Analisis Domain Waktu
Analisis domain waktu dilakukan untuk memahami perilaku sinyal terhadap waktu serta mengidentifikasi karakteristik dinamisnya.
Visualisasi time series dilakukan dengan memplot sinyal terhadap waktu, sehingga pola getaran secara keseluruhan dapat diamati. Melalui plot ini, dapat diidentifikasi adanya transien awal serta dievaluasi kestabilan sinyal ketika telah mencapai kondisi steady-state.
Selain itu, dilakukan perhitungan parameter statistik untuk mengkuantifikasi karakteristik sinyal, antara lain:
- Persamaan RMS
- Persamaan Peak Value
- Persamaan Peak-to-Peak
- Persamaan Crest Factor
Coding Python — Time Domain Analysis
import matplotlib.pyplot as plt
# Statistical parameters
rms = np.sqrt(np.mean(acc_detrended**2))
peak = np.max(np.abs(acc_detrended))
p2p = np.max(acc_detrended) - np.min(acc_detrended)
crest_factor = peak / rms
# Plot time series
plt.figure(figsize=(10,4))
plt.plot(time, acc_detrended)
plt.xlabel('Time (s)')
plt.ylabel('Acceleration (m/s²)')
plt.title('Time Series Vibration Signal')
plt.grid(True)
plt.show()
print("RMS:", rms)
print("Peak:", peak)
print("Peak-to-Peak:", p2p)
print("Crest Factor:", crest_factor)4) Analisis Domain Frekuensi
Analisis domain frekuensi dilakukan menggunakan Fast Fourier Transform (FFT) untuk mengidentifikasi komponen frekuensi yang menyusun sinyal getaran.
Sebelum transformasi dilakukan, sinyal terlebih dahulu diberikan window function, yaitu Hanning window, untuk mengurangi fenomena spectral leakage yang umumnya muncul akibat pemotongan sinyal pada batas awal dan akhir data.
Coding Python — FFT Analysis
from scipy.signal import windows
from scipy.fft import fft, fftfreq
# Apply Hanning window
window = windows.hann(N)
signal_windowed = acc_detrended * window
# FFT
fft_values = fft(signal_windowed)
freqs = fftfreq(N, dt)
# Positive frequencies
half = N // 2
freqs = freqs[:half]
magnitude = 2/N * np.abs(fft_values[:half])
# Plot FFT Spectrum
plt.figure(figsize=(10,4))
plt.semilogy(freqs, magnitude)
plt.xlabel('Frequency (Hz)')
plt.ylabel('Magnitude')
plt.title('FFT Spectrum')
plt.grid(True)
plt.show()5) Analisis Redaman (Damping)
Estimasi parameter redaman dilakukan untuk mengkuantifikasi kemampuan sistem dalam meredam getaran serta memahami karakteristik peluruhan respons dinamis.
Langkah awal adalah mengisolasi region transien, yaitu bagian awal sinyal (sekitar 2 detik pertama) yang mengandung respons peluruhan sebelum sistem mencapai kondisi steady-state.
Selanjutnya diterapkan bandpass filter Butterworth orde 4 untuk mengekstrak komponen frekuensi di sekitar 1X.
- Persamaan Eksponensial Peluruhan
- Persamaan Damping Ratio
- Persamaan Frekuensi Natural Sudut
Coding Python — Damping Analysis
from scipy.signal import butter, filtfilt, hilbert
from scipy.optimize import curve_fit
# Select transient region
mask = time <= 2
t_trans = time[mask]
sig_trans = acc_detrended[mask]
# Butterworth bandpass filter
lowcut = 0.8
highcut = 1.2
b, a = butter(4, [lowcut/(fs/2), highcut/(fs/2)], btype=’band’)
filtered = filtfilt(b, a, sig_trans)
# Envelope using Hilbert transform
analytic_signal = hilbert(filtered)
envelope = np.abs(analytic_signal)
# Exponential decay function
def exp_decay(t, A, beta):
return A * np.exp(-beta * t)
# Curve fitting
params, _ = curve_fit(exp_decay, t_trans, envelope)
A0, beta = params
# Damping ratio
fn = 1.0
omega_n = 2 * np.pi * fn
zeta = beta / omega_n
print(“Decay Constant:”, beta)
print(“Damping Ratio:”, zeta)
# Plot envelope fitting
plt.figure(figsize=(10,4))
plt.plot(t_trans, envelope, label=’Envelope’)
plt.plot(t_trans, exp_decay(t_trans, *params),
label=’Exponential Fit’)
plt.xlabel(‘Time (s)’)
plt.ylabel(‘Amplitude’)
plt.legend()
plt.grid(True)
plt.show()
H. Result & Discussion
BAB IV
PENGOLAHAN DATA DAN ANALISIS DATA
4.1 Analisis Pengukuran
Pada sistem poros propulsi kapal, getaran yang terjadi umumnya dipengaruhi oleh interaksi antara propeller, poros, bantalan, dan fluida di sekitarnya. Oleh karena itu, strategi pengukuran harus mampu menangkap karakteristik getaran secara representatif, baik dalam arah transversal maupun torsional.
Pemilihan tail bearing sebagai lokasi pengukuran sangat tepat karena posisinya berada dekat dengan sumber eksitasi utama, yaitu propeller. Pada titik ini, gaya hidrodinamik dari propeller ditransmisikan langsung ke poros, sehingga respons getaran menjadi paling signifikan. Selain itu, bagian ujung poros yang ditopang oleh tail bearing cenderung mengalami defleksi transversal maksimum, sehingga amplitudo getaran lebih mudah terdeteksi. Lokasi ini juga memungkinkan penangkapan kombinasi getaran torsional dan transversal secara lebih jelas dibandingkan titik lainnya di sepanjang poros.
Penggunaan sensor accelerometer merupakan pilihan yang sesuai untuk aplikasi ini. Sensor ini memiliki rentang frekuensi yang luas dan mampu menangkap komponen frekuensi tinggi yang sering muncul akibat fenomena seperti blade passing frequency, turbulensi aliran, atau cavitation. Selain itu, accelerometer tidak memiliki bagian bergerak sehingga lebih andal dalam lingkungan operasi kapal yang keras, serta mudah dipasang pada struktur poros atau housing bantalan.
Frekuensi sampling sebesar 200 Hz dapat dianggap memadai untuk analisis getaran poros propulsi, terutama jika fokus utama berada pada komponen frekuensi rendah hingga menengah, seperti frekuensi putaran (1X) dan harmoniknya hingga orde ke-5. Dengan memenuhi kriteria Nyquist, data yang diperoleh mampu merepresentasikan fenomena dinamis tanpa terjadi aliasing, sekaligus masih cukup sensitif untuk menangkap respons transien awal saat sistem mulai beroperasi.
Metode pemasangan sensor juga berperan penting dalam menjaga kualitas data. Penggunaan metode stud mounting atau perekat pada permukaan yang bersih dan rata akan memastikan transmisi getaran yang optimal dari struktur ke sensor. Penggunaan magnetic mount sebaiknya dihindari untuk pengukuran frekuensi tinggi karena dapat menurunkan akurasi akibat efek resonansi tambahan. Selain itu, manajemen kabel seperti strain relief perlu diperhatikan agar tidak terjadi noise akibat getaran kabel itu sendiri.
Penambahan sinyal referensi seperti tachometer atau keyphasor memberikan nilai tambah yang signifikan dalam analisis. Dengan adanya sinyal ini, analisis berbasis orde (order analysis) dapat dilakukan, sehingga frekuensi getaran dapat langsung dikaitkan dengan kecepatan putar poros. Hal ini sangat penting untuk diagnosis, misalnya dalam mengidentifikasi unbalance (dominan pada 1X), misalignment (sering muncul pada 2X), atau masalah lain seperti kerusakan bantalan dan eksitasi hidrodinamik. Selain itu, synchronous averaging dapat digunakan untuk mengurangi noise acak dan menonjolkan komponen periodik yang terkait dengan rotasi.
Secara keseluruhan, pendekatan pengukuran ini sudah tepat untuk menganalisis getaran pada poros propulsi, karena mampu menangkap sumber eksitasi utama, menggunakan sensor yang sesuai, serta didukung oleh metode akuisisi dan referensi yang memungkinkan analisis lebih mendalam baik di domain waktu maupun frekuensi.
4.2 Analisis Domain Waktu
Berdasarkan grafik time series yang ditampilkan, terlihat jelas bahwa sinyal getaran memiliki karakteristik osilasi teredam (damped vibration). Amplitudo getaran cukup besar pada awal waktu (sekitar 0–2 detik), kemudian secara bertahap menurun hingga mendekati kondisi stabil setelah sekitar 7–10 detik. Pola ini menunjukkan adanya respons transien yang kuat di awal, yang kemudian mengalami peluruhan akibat mekanisme redaman dalam sistem poros.
Nilai mean yang sangat mendekati nol (−7.1054×10⁻¹⁸ m/s²) mengonfirmasi bahwa sinyal sudah bersih dari DC offset, sehingga distribusi osilasi simetris terhadap garis nol. Hal ini penting karena pada grafik terlihat tidak ada pergeseran baseline, sehingga analisis amplitudo dan frekuensi menjadi lebih akurat.
Dari sisi amplitudo, terlihat bahwa nilai awal mencapai sekitar ±1.3 m/s², yang konsisten dengan peak value sebesar 1.3614 m/s² dan peak-to-peak sebesar 2.7223 m/s². Seiring waktu, amplitudo menurun secara eksponensial, yang memperkuat indikasi adanya redaman viskos atau struktural pada sistem. Nilai RMS sebesar 0.4222 m/s² menunjukkan energi getaran rata-rata yang cukup signifikan, terutama didominasi oleh bagian awal sinyal.
Tabel Parameter Statistik Domain Waktu
| Parameter | Nilai |
|---|---|
| Mean | −7.1054×10⁻¹⁸ m/s² |
| RMS | 0.4222 m/s² |
| Peak Value | 1.3614 m/s² |
| Peak-to-Peak | 2.7223 m/s² |
| Crest Factor | 3.22 |
Nilai crest factor sebesar 3.22 menunjukkan bahwa sinyal tidak berbentuk sinusoidal murni. Hal ini juga terlihat pada grafik, di mana puncak-puncak sinyal tampak lebih tajam dan tidak sepenuhnya halus. Kondisi ini mengindikasikan adanya komponen transien atau gangguan non-linear, yang bisa berasal dari interaksi propeller dengan fluida, ketidakseimbangan (unbalance), atau eksitasi awal saat sistem mulai beroperasi.
Dari segi periodisitas, secara visual jarak antar puncak menunjukkan periode sekitar 0.7–0.8 detik, yang sesuai dengan hasil FFT (0.769 s) dan frekuensi dominan 1.300 Hz. Namun, nilai ini berbeda dari frekuensi rotasi teoritis 1.000 Hz (periode 1.000 s). Hal ini menunjukkan bahwa getaran yang terukur tidak hanya dipengaruhi oleh frekuensi putaran poros (1X), tetapi juga oleh komponen lain yang lebih dominan, kemungkinan akibat eksitasi hidrodinamik dari propeller (blade interaction), fenomena shaft whirling atau fleksibilitas poros, serta ketidaksempurnaan alignment atau distribusi massa.
Perbedaan hasil metode estimasi periode (autocorrelation: 0.230 s dan peak detection: 0.473 s) juga menunjukkan bahwa sinyal mengandung beberapa komponen frekuensi (multi-frequency), sehingga metode yang berbeda menangkap karakteristik yang berbeda (harmonik atau noise periodik).
Nilai verification error sebesar 23.1% mengindikasikan adanya deviasi yang cukup signifikan antara model teoritis dan kondisi aktual. Hal ini wajar pada sistem poros propulsi karena adanya pengaruh kompleks dari interaksi struktur dan fluida yang tidak sepenuhnya dapat direpresentasikan oleh model sederhana berbasis frekuensi rotasi saja.
4.3 Analisis Domain Frekuensi
Berdasarkan spektrum FFT (dengan Hanning window), terlihat bahwa distribusi energi getaran tidak terpusat pada frekuensi rotasi utama (1X), melainkan didominasi oleh komponen frekuensi yang lebih tinggi.
Frekuensi putaran poros:
serta harmoniknya (2X = 2.000 Hz dan 3X = 3.000 Hz) tidak menunjukkan amplitudo yang signifikan. Nilai magnitudo pada 2X hanya sekitar 0.0006 m/s², bahkan mendekati noise floor (0.0008 m/s²). Hal ini mengindikasikan bahwa unbalance maupun misalignment bukan merupakan sumber utama getaran pada sistem ini.
Sebaliknya, puncak dominan justru muncul pada 4.30 Hz dengan magnitudo 0.2043 m/s². Frekuensi ini tidak merupakan kelipatan langsung dari frekuensi rotasi (non-integer multiple), sehingga besar kemungkinan berasal dari:
- Eksitasi hidrodinamik propeller
- Interaksi aliran atau blade passing effect yang tidak ideal
- Fenomena non-linear pada sistem poros atau bantalan
- Resonansi lokal akibat kecocokan antara frekuensi eksitasi dan karakteristik struktur
Selain itu, terdapat puncak signifikan kedua pada 8.70 Hz dengan magnitudo 0.0471 m/s², yang diidentifikasi sebagai frekuensi natural struktur. Menariknya, nilai ini hampir merupakan kelipatan 2 dari 4.30 Hz, yang menunjukkan kemungkinan adanya hubungan harmonik atau eksitasi yang memicu respons resonansi pada sistem. Hal ini mengindikasikan bahwa sistem poros memiliki mode getar alami di sekitar frekuensi tersebut.
Tabel Hasil FFT
| Frekuensi | Magnitudo | Interpretasi |
|---|---|---|
| 1.00 Hz | Kecil | Frekuensi rotasi poros |
| 2.00 Hz | 0.0006 m/s² | Misalignment ringan |
| 3.00 Hz | Sangat kecil | Harmonik minor |
| 4.30 Hz | 0.2043 m/s² | Frekuensi dominan |
| 8.70 Hz | 0.0471 m/s² | Frekuensi natural |
Jika dilihat dari spektrum secara keseluruhan (skala logaritmik), sebagian besar komponen lain berada dekat dengan noise floor, yang berarti energi getaran terkonsentrasi hanya pada frekuensi tertentu (narrowband behavior), bukan tersebar secara acak (broadband).
4.4 Estimasi Damping
Berdasarkan grafik respons transien dan amplop (envelope), terlihat bahwa amplitudo getaran mengalami peluruhan secara eksponensial terhadap waktu. Hal ini menunjukkan bahwa sistem memiliki mekanisme redaman yang bekerja efektif dalam mereduksi energi getaran setelah eksitasi awal. Kurva amplop hasil transformasi Hilbert mengikuti tren eksponensial yang cukup baik, meskipun terdapat sedikit deviasi pada bagian akhir akibat noise atau keterbatasan data.
Persamaan peluruhan amplitudo:
k
Nilai laju peluruhan eksponensial (β) sebesar 1.002 s⁻¹ menunjukkan bahwa energi getaran berkurang dengan cukup cepat. Dengan asumsi frekuensi natural mendekati frekuensi rotasi (1.00 Hz), diperoleh rasio redaman:
dengan nilai ζ sebesar 0.1595. Nilai ini tergolong redaman sedang (moderate damping), yang berarti sistem tidak terlalu kaku namun juga tidak terlalu bebas berosilasi. Hal ini sesuai dengan karakteristik sistem poros propulsi yang umumnya memiliki kombinasi redaman struktural dan fluida.
Frekuensi natural sudut:
Frekuensi natural teredam yang diperoleh sebesar 0.99 Hz sangat dekat dengan frekuensi natural tak teredam (1.00 Hz), yang menunjukkan bahwa efek redaman tidak secara signifikan menggeser frekuensi sistem, tetapi lebih berperan dalam mengurangi amplitudo getaran.
Namun, ketika dibandingkan dengan metode logarithmic decrement, diperoleh nilai rasio redaman yang lebih kecil, yaitu ζ = 0.0734. Perbedaan ini cukup signifikan dan dapat disebabkan oleh beberapa faktor, seperti sensitivitas metode terhadap pemilihan puncak sinyal, keberadaan noise, serta asumsi bahwa sistem bersifat linier dan single degree of freedom.
Tabel Hasil Estimasi Damping
| Parameter | Nilai |
|---|---|
| Decay Constant (β) | 1.002 s⁻¹ |
| Damping Ratio (Curve Fit) | 0.1595 |
| Damping Ratio (Log Decrement) | 0.0734 |
| Damped Natural Frequency | 0.99 Hz |
Dari grafik juga terlihat bahwa pada bagian akhir (mendekati 2 detik), amplop mulai mengalami penyimpangan dan sedikit peningkatan, yang kemungkinan disebabkan oleh noise atau kontribusi frekuensi lain di luar band 1X. Hal ini menunjukkan bahwa estimasi redaman paling akurat berada pada bagian awal sinyal, saat respons transien masih dominan.
I. Acknowledgments
BAB V
KESIMPULAN
5.1 Kesimpulan
Berdasarkan hasil analisis yang telah dilakukan, dapat disimpulkan bahwa sinyal getaran pada poros propulsi menunjukkan karakteristik osilasi teredam dengan respons transien yang cukup dominan pada awal waktu. Proses pra-pemrosesan, khususnya penghilangan DC offset, berhasil menghasilkan sinyal yang terpusat di sekitar nol sehingga layak untuk dianalisis lebih lanjut.
Analisis domain waktu menunjukkan bahwa energi getaran berada pada tingkat moderat dengan adanya indikasi komponen transien, yang ditunjukkan oleh nilai crest factor yang relatif tinggi. Selain itu, terdapat perbedaan antara frekuensi teoritis dan frekuensi dominan hasil pengamatan, yang menandakan bahwa sistem tidak hanya dipengaruhi oleh frekuensi rotasi utama, tetapi juga oleh komponen dinamis lainnya.
Hasil analisis domain frekuensi mengungkapkan bahwa komponen 1X, 2X, dan 3X tidak dominan, sehingga unbalance dan misalignment bukan merupakan sumber utama getaran. Sebaliknya, getaran didominasi oleh frekuensi non-harmonik yang mengindikasikan adanya pengaruh eksitasi hidrodinamik dan kemungkinan resonansi struktur pada sistem poros.
Frekuensi rotasi teoritis sistem:
Estimasi parameter redaman menunjukkan bahwa sistem memiliki redaman sedang, yang cukup efektif dalam mereduksi amplitudo getaran seiring waktu. Perbedaan nilai rasio redaman dari beberapa metode menunjukkan bahwa sistem memiliki karakteristik yang kompleks, dipengaruhi oleh multi-mode vibration dan interaksi fluida-struktur.
Persamaan rasio redaman:
Secara keseluruhan, getaran pada poros propulsi tidak hanya disebabkan oleh faktor mekanis klasik, tetapi juga oleh fenomena dinamis yang lebih kompleks, sehingga diperlukan pendekatan analisis yang komprehensif serta penerapan solusi rekayasa yang tepat untuk mengendalikan getaran dan menjaga keandalan sistem.
References
- International Maritime Organization (2021). Guidelines for Maintenance and Inspection of Ship Machinery and Equipment. London: IMO.
- American Bureau of Shipping (ABS), Guide for Machinery Condition Monitoring Techniques and Systems. Houston, TX, USA: ABS, 2022.
- A. K. S. Jardine and A. H. C. Tsang, Maintenance, Replacement, and Reliability: Theory and Applications. Boca Raton, FL, USA: CRC Press, 2006.
- D. J. Inman, Engineering Vibration, 4th ed. Boston, MA, USA: Pearson, 2014.
- S. S. Rao, Mechanical Vibrations, 6th ed. Harlow, U.K.: Pearson, 2017.