A. Project Title
Analisis Gerakan Heave Kapal Ikan Menggunakan Metode Runge–Kutta Orde 4 dan ANSYS AQWA Berbasis Kerangka DAI5
B. Author Complete Name
Fadhillah Akmal Ariandi
C. Affiliation
Program Studi Teknik Perkapalan
Departemen Teknik Mesin
Fakultas Teknik
Universitas Indonesia
D. Abstract
Kapal yang beroperasi di laut akan mengalami respon gerakan akibat pengaruh gelombang, salah satunya adalah gerakan heave atau gerakan naik-turun. Gerakan ini penting untuk dianalisis karena berhubungan dengan kenyamanan, keselamatan, dan performa kapal saat beroperasi di laut. Project ini membahas analisis gerakan heave kapal ikan menggunakan pendekatan metode numerik dan simulasi hidrodinamika.
Model kapal yang digunakan merupakan kapal ikan tipe displacement hull dengan displacement sekitar 60,2 ton, panjang garis air 19,1 m, lebar 4,7 m, draft 1,2 m, dan koefisien waterplane sebesar 0,76. Data tersebut diambil dari simulasi seakeeping ANSYS AQWA yang telah dilakukan sebelumnya. Pada project ini, gerakan heave dimodelkan sebagai sistem dinamis satu derajat kebebasan dengan bentuk persamaan diferensial orde dua. Persamaan tersebut kemudian diselesaikan menggunakan metode Runge–Kutta orde 4 untuk memperoleh respon heave terhadap waktu.
Hasil numerik dari metode RK4 kemudian dibandingkan dengan hasil simulasi ANSYS AQWA, khususnya pada nilai RAO heave. Melalui pendekatan ini, project diharapkan dapat menunjukkan penerapan metode numerik dalam bidang teknik perkapalan serta memberikan pemahaman sederhana mengenai hubungan antara frekuensi gelombang dan respon gerakan kapal.
E. Author Declaration
1. Deep Awareness of I
Dalam menyusun project ini, saya menyadari bahwa proses analisis teknik tidak hanya sekadar melakukan perhitungan, tetapi juga merupakan bentuk tanggung jawab dalam memahami fenomena fisik secara benar. Sebagai mahasiswa teknik perkapalan, saya perlu menyadari bahwa setiap model, asumsi, dan hasil perhitungan memiliki keterbatasan. Oleh karena itu, penggunaan metode numerik dalam project ini dilakukan dengan kesadaran bahwa hasil yang diperoleh harus dipahami secara kritis, bukan hanya diterima sebagai angka akhir.
Kesadaran ini juga berkaitan dengan tanggung jawab moral seorang engineer. Analisis gerakan kapal berhubungan dengan keselamatan, kenyamanan, dan operabilitas kapal di laut. Dengan demikian, project ini tidak hanya bertujuan untuk menyelesaikan tugas, tetapi juga menjadi latihan untuk memahami bagaimana keputusan teknis dapat berdampak pada manusia, lingkungan, dan sistem transportasi laut.
2. Intention of the Project Activity
Niat utama dari project ini adalah memahami penerapan metode numerik dalam menganalisis gerakan kapal akibat gelombang laut. Project ini difokuskan pada gerakan heave agar pembahasan dapat dilakukan secara sederhana namun tetap memiliki dasar teknik yang jelas.
Selain itu, project ini bertujuan untuk menghubungkan model matematis sederhana dengan hasil simulasi software hidrodinamika. Dengan membandingkan hasil Runge–Kutta orde 4 dan ANSYS AQWA, diharapkan dapat diperoleh pemahaman mengenai kelebihan dan keterbatasan masing-masing pendekatan dalam analisis seakeeping kapal.
F. Introduction
Kapal yang beroperasi di laut tidak hanya bergerak maju, tetapi juga mengalami gerakan akibat pengaruh gelombang. Dalam ilmu hidrodinamika kapal, respon gerakan kapal terhadap gelombang dikenal sebagai seakeeping. Gerakan kapal dalam seakeeping dapat berupa heave, pitch, dan roll. Dari ketiga gerakan tersebut, heave merupakan gerakan naik-turun kapal yang terjadi akibat gaya gelombang secara vertikal.
Analisis seakeeping penting dilakukan karena respon gerakan kapal dapat mempengaruhi keselamatan, kenyamanan, dan performa operasional kapal. Dalam laporan seakeeping sebelumnya, analisis dilakukan menggunakan ANSYS AQWA untuk mempelajari respon kapal terhadap berbagai arah gelombang dan kondisi kecepatan. Software tersebut digunakan untuk memperoleh karakteristik gerakan kapal, termasuk nilai RAO pada kondisi zero speed dan forward speed.
Pada project ini, pembahasan difokuskan hanya pada gerakan heave agar model yang digunakan tetap sederhana. Gerakan heave dimodelkan sebagai sistem massa–pegas–peredam dengan satu derajat kebebasan. Model ini kemudian diselesaikan menggunakan metode Runge–Kutta orde 4, lalu hasilnya dibandingkan dengan hasil simulasi ANSYS AQWA.
Initial Thinking about the Problem
Permasalahan utama dalam project ini adalah bagaimana memodelkan respon heave kapal terhadap gelombang laut menggunakan metode numerik yang sederhana. Pada kondisi nyata, gerakan kapal dipengaruhi oleh bentuk lambung, distribusi massa, arah gelombang, frekuensi gelombang, kecepatan kapal, serta interaksi fluida dan struktur. Namun, jika seluruh faktor tersebut dimasukkan secara langsung, model menjadi terlalu kompleks untuk project metode numerik sederhana.
Oleh karena itu, pendekatan awal yang digunakan adalah menyederhanakan kapal sebagai sistem satu derajat kebebasan. Dalam model ini, gerakan heave dipengaruhi oleh massa efektif kapal, redaman, gaya pemulih hidrostatik, dan gaya eksitasi gelombang. Penyederhanaan ini memungkinkan persamaan gerak kapal ditulis dalam bentuk persamaan diferensial orde dua yang dapat diselesaikan menggunakan metode numerik.
Kesenjangan yang ingin dilihat adalah perbedaan antara model numerik sederhana dan simulasi hidrodinamika yang lebih kompleks. ANSYS AQWA dapat menghitung parameter hidrodinamika dengan pendekatan yang lebih realistis, sedangkan RK4 hanya menyelesaikan model ODE sederhana. Dengan membandingkan keduanya, dapat dianalisis sejauh mana model sederhana mampu merepresentasikan karakteristik gerakan heave kapal.
G. Methods & Procedures
1. Idealization
Pada project ini, kapal diidealisasikan sebagai sistem dinamis linier satu derajat kebebasan. Gerakan yang dianalisis hanya gerakan heave, sedangkan gerakan pitch dan roll tidak dibahas dalam pemodelan numerik. Gelombang diasumsikan berbentuk sinusoidal sehingga gaya eksitasi yang bekerja pada kapal juga bersifat periodik terhadap waktu.
Parameter kapal yang digunakan mengacu pada data kapal ikan dari laporan simulasi ANSYS AQWA sebelumnya. Kapal tersebut memiliki displacement 60,2 ton, LWL 19,1 m, beam 4,7 m, draft 1,2 m, dan koefisien waterplane Cw=0,76. Massa jenis air laut yang digunakan adalah 1,025 ton/m³.
Beberapa asumsi tambahan digunakan agar model dapat dihitung secara sederhana. Added mass diasumsikan sebesar 20% dari massa kapal, redaman hidrodinamik dianggap konstan, dan amplitudo gelombang diasumsikan sebesar 1 meter. Asumsi ini digunakan agar persamaan gerak dapat diselesaikan secara numerik menggunakan metode RK4.
2. Model Matematis
Gerakan heave kapal dimodelkan dengan persamaan:
dengan:
Koefisien gaya pemulih hidrostatik dihitung menggunakan:
Massa kapal adalah:
Added mass diasumsikan:
Sehingga massa efektif sistem adalah:
Dengan demikian, persamaan yang digunakan menjadi:
3. Instruction Set
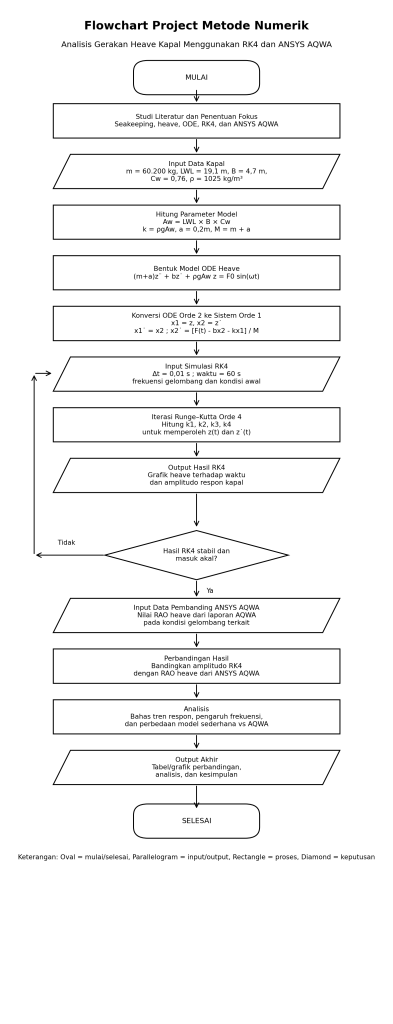
Langkah pengerjaan project ini dilakukan sebagai berikut:
- Menentukan fokus project, yaitu analisis gerakan heave kapal.
- Mengambil parameter kapal dari laporan simulasi ANSYS AQWA sebelumnya.
- Menghitung luas waterplane area menggunakan Aw=LWL×B×Cw.
- Menghitung koefisien gaya pemulih hidrostatik menggunakan k=ρgAw.
- Menentukan massa efektif kapal dengan memasukkan massa kapal dan asumsi added mass.
- Menyusun persamaan diferensial orde dua untuk gerakan heave.
- Mengubah persamaan orde dua menjadi sistem persamaan orde satu.
- Menyelesaikan sistem persamaan menggunakan metode Runge–Kutta orde 4.
- Menampilkan hasil RK4 dalam bentuk grafik heave terhadap waktu.
- Mengambil data RAO heave dari hasil simulasi ANSYS AQWA.
- Membandingkan hasil RK4 dan AQWA.
- Menyusun analisis, kesimpulan, dan rekomendasi.