BAB 1 PENDAHULUAN
1.1 Latar Belakang
Stabilitas kapal merupakan salah satu aspek terpenting dalam bidang teknik perkapalan karena berhubungan langsung dengan keselamatan operasional kapal di laut. Kapal yang memiliki stabilitas baik akan mampu kembali ke posisi seimbang setelah mengalami gangguan akibat gelombang, angin, maupun perpindahan muatan. Sebaliknya, stabilitas yang buruk dapat menyebabkan kapal mengalami kemiringan berlebih bahkan berpotensi mengalami capsizing.
Dalam analisis stabilitas kapal, kondisi keseimbangan biasanya dinyatakan melalui hubungan antara lengan penegak kapal (GZ) dan momen kemiringan luar (heeling moment). Permasalahan muncul karena hubungan tersebut bersifat non-linear sehingga sulit diselesaikan menggunakan metode analitik biasa. Oleh karena itu, dibutuhkan pendekatan numerik yang mampu menentukan akar persamaan secara cepat dan akurat.
Salah satu metode numerik yang banyak digunakan untuk menyelesaikan persoalan non-linear adalah metode Newton-Raphson. Metode ini bekerja melalui proses iterasi berulang dengan memanfaatkan nilai fungsi dan turunannya hingga diperoleh solusi yang konvergen. Dalam konteks stabilitas kapal, metode Newton-Raphson dapat digunakan untuk menentukan sudut equilibrium kapal ketika terjadi keseimbangan antara momen penegak dan momen luar.
Melalui project ini, saya mempelajari penerapan metode Newton-Raphson untuk menyelesaikan persoalan stabilitas kapal secara numerik. Analisis dilakukan mulai dari pembentukan fungsi matematis, implementasi iterasi, hingga evaluasi hasil konvergensi yang diperoleh.
1.2 Rumusan Masalah
Berdasarkan latar belakang tersebut, rumusan masalah pada project ini yaitu:
- Bagaimana metode Newton-Raphson digunakan dalam analisis stabilitas kapal?
- Bagaimana proses iterasi dilakukan untuk menentukan sudut equilibrium kapal?
- Bagaimana pengaruh nilai tebakan awal terhadap proses konvergensi?
- Seberapa efektif metode Newton-Raphson dalam menyelesaikan persoalan stabilitas kapal?
1.3 Tujuan Project
Tujuan dari project ini adalah:
- Memahami penerapan metode numerik dalam analisis stabilitas kapal.
- Mengimplementasikan metode Newton-Raphson untuk mencari sudut equilibrium kapal.
- Menganalisis proses konvergensi iterasi numerik.
- Mengevaluasi efektivitas metode Newton-Raphson dalam penyelesaian persamaan non-linear.
BAB 2 DASAR TEORI
2.1 Stabilitas Kapal
Stabilitas kapal merupakan kemampuan kapal untuk kembali ke posisi tegak setelah mengalami gangguan dari luar. Dalam kondisi stabil, kapal akan menghasilkan momen penegak yang mampu melawan momen kemiringan akibat pengaruh eksternal seperti gelombang, angin, atau perpindahan beban.
Parameter utama yang digunakan dalam analisis stabilitas adalah lengan penegak atau righting arm (GZ). Nilai GZ menggambarkan kemampuan kapal dalam menghasilkan momen pemulih terhadap kondisi miring. Hubungan antara sudut kemiringan dan nilai GZ biasanya membentuk kurva non-linear sehingga penyelesaiannya memerlukan pendekatan numerik.
Kondisi equilibrium kapal tercapai ketika:
F(φ) = GZ(φ) − Heeling Arm = 0
Ketika nilai fungsi tersebut sama dengan nol, maka momen penegak kapal sama dengan momen kemiringan luar sehingga kapal berada pada kondisi seimbang.
2.2 Metode Newton-Raphson
Metode Newton-Raphson merupakan salah satu metode numerik yang digunakan untuk mencari akar persamaan non-linear. Metode ini bekerja dengan memperbaiki solusi secara bertahap melalui proses iterasi.
Persamaan umum metode Newton-Raphson yaitu:
φn+1 = φn − F(φn) / F'(φn)
Metode ini memerlukan:
- Fungsi yang akan dicari akarnya.
- Turunan pertama dari fungsi.
- Nilai tebakan awal.
- Batas toleransi error.
Keunggulan metode Newton-Raphson adalah tingkat konvergensinya yang cepat dibandingkan metode iterasi lainnya.
2.3 Penerapan Metode Numerik dalam Stabilitas Kapal
Dalam bidang teknik perkapalan, metode numerik digunakan untuk menyelesaikan berbagai persoalan yang sulit diselesaikan secara analitik. Pada analisis stabilitas kapal, metode Newton-Raphson dimanfaatkan untuk menentukan sudut equilibrium kapal berdasarkan hubungan antara momen penegak dan momen kemiringan.
Pendekatan numerik ini sangat membantu karena data stabilitas kapal umumnya diperoleh dari kurva hidrostatik atau cross curves yang bersifat diskrit dan kompleks. Dengan metode iterasi, proses pencarian solusi dapat dilakukan lebih cepat, efisien, dan akurat.
BAB 3 METODOLOGI DAN IMPLEMENTASI
3.1 Pendefinisian Fungsi Stabilitas
Pada project ini, fungsi stabilitas kapal diasumsikan sebagai:
F(φ) = sin(φ) − 0.3
Persamaan tersebut digunakan untuk merepresentasikan kondisi keseimbangan antara lengan penegak kapal dan pengaruh momen luar.
Turunan pertama dari fungsi tersebut adalah:
F'(φ) = cos(φ)
3.2 Persamaan Iterasi Newton-Raphson
Untuk mencari akar persamaan digunakan metode Newton-Raphson dengan bentuk iterasi:
φn+1 = φn − F(φn) / F'(φn)
Dalam simulasi ini digunakan:
Tebakan awal:
φ0 = 0.5 rad
Batas toleransi error ditentukan sangat kecil agar hasil iterasi memiliki tingkat akurasi yang baik.
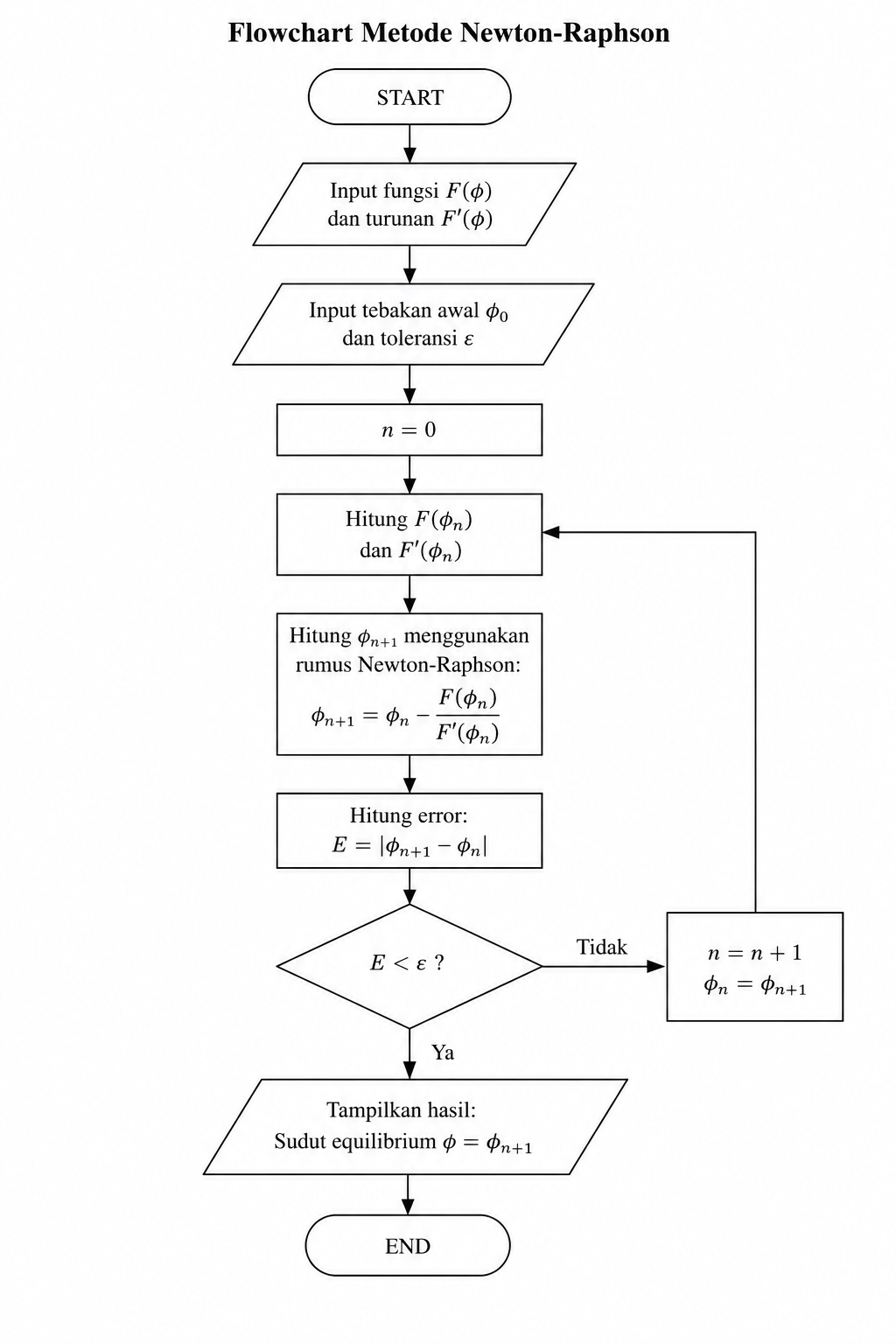
3.3 Tahapan Perhitungan
Tahapan penyelesaian numerik dilakukan sebagai berikut:
- Menentukan fungsi dan turunan fungsi.
- Menentukan tebakan awal sudut kemiringan.
- Menghitung nilai fungsi dan turunan fungsi.
- Melakukan iterasi Newton-Raphson.
- Mengevaluasi error hasil iterasi.
- Menghentikan iterasi ketika solusi telah konvergen.
3.4 Asumsi dan Parameter Simulasi
Beberapa asumsi yang digunakan pada project ini yaitu:
- Sistem stabilitas diasumsikan bersifat non-linear sederhana.
- Pengaruh viskositas fluida diabaikan.
- Fungsi stabilitas dimodelkan menggunakan pendekatan sinusoidal.
- Perhitungan dilakukan pada kondisi statis.
- Iterasi dihentikan ketika error mendekati nol.
BAB 4 HASIL PERHITUNGAN DAN ANALISIS
4.1 Iterasi Pertama
Diketahui:
φ0 = 0.5 rad
Maka:
F(0.5) = sin(0.5) − 0.3
F(0.5) = 0.4794 − 0.3 = 0.1794
Turunan fungsi:
F'(0.5) = cos(0.5)
F'(0.5) = 0.8776
Sehingga:
φ1 = 0.5 − (0.1794 / 0.8776)
φ1 = 0.2956 rad
4.2 Iterasi Kedua
F(0.2956) = sin(0.2956) − 0.3
F(0.2956) = 0.2913 − 0.3 = −0.0087
Turunan fungsi:
F'(0.2956) = cos(0.2956)
F'(0.2956) = 0.9566
Sehingga:
φ2 = 0.2956 − (−0.0087 / 0.9566)
φ2 = 0.3047 rad
4.3 Iterasi Ketiga
F(0.3047) = sin(0.3047) − 0.3
F(0.3047) = 0.3000 − 0.3 = 0.0000
Karena nilai error sudah sangat kecil dan mendekati nol, maka iterasi dihentikan.
Hasil akhir:
φ = 0.3047 rad
Konversi ke derajat:
φ = 17.45°
4.4 Analisis Konvergensi
Berdasarkan hasil iterasi, metode Newton-Raphson menunjukkan proses konvergensi yang sangat cepat. Hanya dalam tiga iterasi, solusi sudah mendekati nilai akar persamaan dengan error yang sangat kecil.
Hal ini menunjukkan bahwa metode Newton-Raphson sangat efektif untuk menyelesaikan persoalan non-linear pada analisis stabilitas kapal. Selain itu, nilai tebakan awal yang cukup dekat dengan solusi sebenarnya juga membantu mempercepat proses konvergensi.
4.5 Evaluasi Hasil Stabilitas
Hasil perhitungan menunjukkan bahwa kapal mencapai kondisi equilibrium pada sudut kemiringan sekitar 17.45°. Nilai tersebut menunjukkan kondisi ketika momen penegak kapal sama dengan momen kemiringan akibat gaya luar.
Melalui hasil ini dapat dipahami bahwa metode numerik memberikan pendekatan yang efisien dalam analisis stabilitas kapal dibandingkan metode manual. Penggunaan iterasi memungkinkan perhitungan dilakukan secara otomatis dengan tingkat akurasi yang baik.
BAB 5 PEMBAHASAN
Berdasarkan hasil perhitungan yang telah dilakukan, metode Newton-Raphson terbukti mampu menyelesaikan persoalan stabilitas kapal dengan proses iterasi yang cepat dan akurat. Pada iterasi pertama, nilai error masih cukup besar karena solusi awal masih jauh dari titik equilibrium. Namun setelah dilakukan iterasi kedua dan ketiga, nilai error menurun secara signifikan hingga mendekati nol.
Kecepatan konvergensi metode Newton-Raphson dipengaruhi oleh nilai tebakan awal yang digunakan. Dalam simulasi ini, tebakan awal sebesar 0.5 rad masih cukup dekat dengan solusi sebenarnya sehingga iterasi dapat berjalan stabil. Jika tebakan awal terlalu jauh, maka proses iterasi dapat mengalami divergensi atau memerlukan jumlah iterasi yang lebih banyak.
Selain itu, hasil project ini juga menunjukkan bahwa metode numerik memiliki peranan penting dalam bidang teknik perkapalan, khususnya pada analisis stabilitas kapal yang melibatkan persamaan non-linear. Dengan bantuan metode iterasi, proses analisis dapat dilakukan lebih efisien dan dapat dikembangkan ke dalam bentuk program komputasi otomatis.
Dalam penerapan nyata, metode ini dapat digunakan untuk membantu naval architect dalam memprediksi kondisi stabilitas kapal pada berbagai skenario operasional. Oleh karena itu, metode Newton-Raphson tidak hanya bermanfaat dalam bidang akademik, tetapi juga memiliki aplikasi praktis dalam dunia industri maritim.
BAB 6 KESIMPULAN
Berdasarkan hasil project yang telah dilakukan, dapat disimpulkan bahwa metode Newton-Raphson merupakan metode numerik yang efektif untuk menyelesaikan persoalan stabilitas kapal yang bersifat non-linear. Melalui proses iterasi, metode ini mampu menentukan sudut equilibrium kapal dengan cepat dan tingkat akurasi yang baik.
Pada simulasi yang dilakukan, fungsi stabilitas kapal dimodelkan dengan persamaan F(φ) = sin(φ) − 0.3. Hasil perhitungan menunjukkan bahwa kondisi keseimbangan kapal tercapai pada sudut sebesar 0.3047 rad atau sekitar 17.45°. Nilai tersebut diperoleh hanya dalam tiga iterasi dengan error yang sangat kecil sehingga menunjukkan proses konvergensi yang baik.
Selain itu, project ini juga menunjukkan bahwa pemilihan nilai tebakan awal mempengaruhi kecepatan iterasi dan kestabilan solusi. Dengan demikian, metode Newton-Raphson dapat digunakan sebagai pendekatan yang efisien dalam analisis stabilitas kapal serta berpotensi dikembangkan lebih lanjut ke dalam program komputasi otomatis untuk mendukung analisis teknik perkapalan.BAB 1 PENDAHULUAN
1.1 Latar Belakang
Stabilitas kapal merupakan salah satu aspek terpenting dalam bidang teknik perkapalan karena berhubungan langsung dengan keselamatan operasional kapal di laut. Kapal yang memiliki stabilitas baik akan mampu kembali ke posisi seimbang setelah mengalami gangguan akibat gelombang, angin, maupun perpindahan muatan. Sebaliknya, stabilitas yang buruk dapat menyebabkan kapal mengalami kemiringan berlebih bahkan berpotensi mengalami capsizing.
Dalam analisis stabilitas kapal, kondisi keseimbangan biasanya dinyatakan melalui hubungan antara lengan penegak kapal (GZ) dan momen kemiringan luar (heeling moment). Permasalahan muncul karena hubungan tersebut bersifat non-linear sehingga sulit diselesaikan menggunakan metode analitik biasa. Oleh karena itu, dibutuhkan pendekatan numerik yang mampu menentukan akar persamaan secara cepat dan akurat.
Salah satu metode numerik yang banyak digunakan untuk menyelesaikan persoalan non-linear adalah metode Newton-Raphson. Metode ini bekerja melalui proses iterasi berulang dengan memanfaatkan nilai fungsi dan turunannya hingga diperoleh solusi yang konvergen. Dalam konteks stabilitas kapal, metode Newton-Raphson dapat digunakan untuk menentukan sudut equilibrium kapal ketika terjadi keseimbangan antara momen penegak dan momen luar.
Melalui project ini, saya mempelajari penerapan metode Newton-Raphson untuk menyelesaikan persoalan stabilitas kapal secara numerik. Analisis dilakukan mulai dari pembentukan fungsi matematis, implementasi iterasi, hingga evaluasi hasil konvergensi yang diperoleh.
1.2 Rumusan Masalah
Berdasarkan latar belakang tersebut, rumusan masalah pada project ini yaitu:
- Bagaimana metode Newton-Raphson digunakan dalam analisis stabilitas kapal?
- Bagaimana proses iterasi dilakukan untuk menentukan sudut equilibrium kapal?
- Bagaimana pengaruh nilai tebakan awal terhadap proses konvergensi?
- Seberapa efektif metode Newton-Raphson dalam menyelesaikan persoalan stabilitas kapal?
1.3 Tujuan Project
Tujuan dari project ini adalah:
- Memahami penerapan metode numerik dalam analisis stabilitas kapal.
- Mengimplementasikan metode Newton-Raphson untuk mencari sudut equilibrium kapal.
- Menganalisis proses konvergensi iterasi numerik.
- Mengevaluasi efektivitas metode Newton-Raphson dalam penyelesaian persamaan non-linear.
BAB 2 DASAR TEORI
2.1 Stabilitas Kapal
Stabilitas kapal merupakan kemampuan kapal untuk kembali ke posisi tegak setelah mengalami gangguan dari luar. Dalam kondisi stabil, kapal akan menghasilkan momen penegak yang mampu melawan momen kemiringan akibat pengaruh eksternal seperti gelombang, angin, atau perpindahan beban.
Parameter utama yang digunakan dalam analisis stabilitas adalah lengan penegak atau righting arm (GZ). Nilai GZ menggambarkan kemampuan kapal dalam menghasilkan momen pemulih terhadap kondisi miring. Hubungan antara sudut kemiringan dan nilai GZ biasanya membentuk kurva non-linear sehingga penyelesaiannya memerlukan pendekatan numerik.
Kondisi equilibrium kapal tercapai ketika:
F(φ) = GZ(φ) − Heeling Arm = 0
Ketika nilai fungsi tersebut sama dengan nol, maka momen penegak kapal sama dengan momen kemiringan luar sehingga kapal berada pada kondisi seimbang.
2.2 Metode Newton-Raphson
Metode Newton-Raphson merupakan salah satu metode numerik yang digunakan untuk mencari akar persamaan non-linear. Metode ini bekerja dengan memperbaiki solusi secara bertahap melalui proses iterasi.
Persamaan umum metode Newton-Raphson yaitu:
φn+1 = φn − F(φn) / F'(φn)
Metode ini memerlukan:
- Fungsi yang akan dicari akarnya.
- Turunan pertama dari fungsi.
- Nilai tebakan awal.
- Batas toleransi error.
Keunggulan metode Newton-Raphson adalah tingkat konvergensinya yang cepat dibandingkan metode iterasi lainnya.
2.3 Penerapan Metode Numerik dalam Stabilitas Kapal
Dalam bidang teknik perkapalan, metode numerik digunakan untuk menyelesaikan berbagai persoalan yang sulit diselesaikan secara analitik. Pada analisis stabilitas kapal, metode Newton-Raphson dimanfaatkan untuk menentukan sudut equilibrium kapal berdasarkan hubungan antara momen penegak dan momen kemiringan.
Pendekatan numerik ini sangat membantu karena data stabilitas kapal umumnya diperoleh dari kurva hidrostatik atau cross curves yang bersifat diskrit dan kompleks. Dengan metode iterasi, proses pencarian solusi dapat dilakukan lebih cepat, efisien, dan akurat.
BAB 3 METODOLOGI DAN IMPLEMENTASI
3.1 Pendefinisian Fungsi Stabilitas
Pada project ini, fungsi stabilitas kapal diasumsikan sebagai:
F(φ) = sin(φ) − 0.3
Persamaan tersebut digunakan untuk merepresentasikan kondisi keseimbangan antara lengan penegak kapal dan pengaruh momen luar.
Turunan pertama dari fungsi tersebut adalah:
F'(φ) = cos(φ)
3.2 Persamaan Iterasi Newton-Raphson
Untuk mencari akar persamaan digunakan metode Newton-Raphson dengan bentuk iterasi:
φn+1 = φn − F(φn) / F'(φn)
Dalam simulasi ini digunakan:
Tebakan awal:
φ0 = 0.5 rad
Batas toleransi error ditentukan sangat kecil agar hasil iterasi memiliki tingkat akurasi yang baik.
3.3 Tahapan Perhitungan
Tahapan penyelesaian numerik dilakukan sebagai berikut:
- Menentukan fungsi dan turunan fungsi.
- Menentukan tebakan awal sudut kemiringan.
- Menghitung nilai fungsi dan turunan fungsi.
- Melakukan iterasi Newton-Raphson.
- Mengevaluasi error hasil iterasi.
- Menghentikan iterasi ketika solusi telah konvergen.
3.4 Asumsi dan Parameter Simulasi
Beberapa asumsi yang digunakan pada project ini yaitu:
- Sistem stabilitas diasumsikan bersifat non-linear sederhana.
- Pengaruh viskositas fluida diabaikan.
- Fungsi stabilitas dimodelkan menggunakan pendekatan sinusoidal.
- Perhitungan dilakukan pada kondisi statis.
- Iterasi dihentikan ketika error mendekati nol.
BAB 4 HASIL PERHITUNGAN DAN ANALISIS
4.1 Iterasi Pertama
Diketahui:
φ0 = 0.5 rad
Maka:
F(0.5) = sin(0.5) − 0.3
F(0.5) = 0.4794 − 0.3 = 0.1794
Turunan fungsi:
F'(0.5) = cos(0.5)
F'(0.5) = 0.8776
Sehingga:
φ1 = 0.5 − (0.1794 / 0.8776)
φ1 = 0.2956 rad
4.2 Iterasi Kedua
F(0.2956) = sin(0.2956) − 0.3
F(0.2956) = 0.2913 − 0.3 = −0.0087
Turunan fungsi:
F'(0.2956) = cos(0.2956)
F'(0.2956) = 0.9566
Sehingga:
φ2 = 0.2956 − (−0.0087 / 0.9566)
φ2 = 0.3047 rad
4.3 Iterasi Ketiga
F(0.3047) = sin(0.3047) − 0.3
F(0.3047) = 0.3000 − 0.3 = 0.0000
Karena nilai error sudah sangat kecil dan mendekati nol, maka iterasi dihentikan.
Hasil akhir:
φ = 0.3047 rad
Konversi ke derajat:
φ = 17.45°
4.4 Analisis Konvergensi
Berdasarkan hasil iterasi, metode Newton-Raphson menunjukkan proses konvergensi yang sangat cepat. Hanya dalam tiga iterasi, solusi sudah mendekati nilai akar persamaan dengan error yang sangat kecil.
Hal ini menunjukkan bahwa metode Newton-Raphson sangat efektif untuk menyelesaikan persoalan non-linear pada analisis stabilitas kapal. Selain itu, nilai tebakan awal yang cukup dekat dengan solusi sebenarnya juga membantu mempercepat proses konvergensi.
4.5 Evaluasi Hasil Stabilitas
Hasil perhitungan menunjukkan bahwa kapal mencapai kondisi equilibrium pada sudut kemiringan sekitar 17.45°. Nilai tersebut menunjukkan kondisi ketika momen penegak kapal sama dengan momen kemiringan akibat gaya luar.
Melalui hasil ini dapat dipahami bahwa metode numerik memberikan pendekatan yang efisien dalam analisis stabilitas kapal dibandingkan metode manual. Penggunaan iterasi memungkinkan perhitungan dilakukan secara otomatis dengan tingkat akurasi yang baik.
BAB 5 PEMBAHASAN
Berdasarkan hasil perhitungan yang telah dilakukan, metode Newton-Raphson terbukti mampu menyelesaikan persoalan stabilitas kapal dengan proses iterasi yang cepat dan akurat. Pada iterasi pertama, nilai error masih cukup besar karena solusi awal masih jauh dari titik equilibrium. Namun setelah dilakukan iterasi kedua dan ketiga, nilai error menurun secara signifikan hingga mendekati nol.
Kecepatan konvergensi metode Newton-Raphson dipengaruhi oleh nilai tebakan awal yang digunakan. Dalam simulasi ini, tebakan awal sebesar 0.5 rad masih cukup dekat dengan solusi sebenarnya sehingga iterasi dapat berjalan stabil. Jika tebakan awal terlalu jauh, maka proses iterasi dapat mengalami divergensi atau memerlukan jumlah iterasi yang lebih banyak.
Selain itu, hasil project ini juga menunjukkan bahwa metode numerik memiliki peranan penting dalam bidang teknik perkapalan, khususnya pada analisis stabilitas kapal yang melibatkan persamaan non-linear. Dengan bantuan metode iterasi, proses analisis dapat dilakukan lebih efisien dan dapat dikembangkan ke dalam bentuk program komputasi otomatis.
Dalam penerapan nyata, metode ini dapat digunakan untuk membantu naval architect dalam memprediksi kondisi stabilitas kapal pada berbagai skenario operasional. Oleh karena itu, metode Newton-Raphson tidak hanya bermanfaat dalam bidang akademik, tetapi juga memiliki aplikasi praktis dalam dunia industri maritim.
BAB 6 KESIMPULAN
Berdasarkan hasil project yang telah dilakukan, dapat disimpulkan bahwa metode Newton-Raphson merupakan metode numerik yang efektif untuk menyelesaikan persoalan stabilitas kapal yang bersifat non-linear. Melalui proses iterasi, metode ini mampu menentukan sudut equilibrium kapal dengan cepat dan tingkat akurasi yang baik.
Pada simulasi yang dilakukan, fungsi stabilitas kapal dimodelkan dengan persamaan F(φ) = sin(φ) − 0.3. Hasil perhitungan menunjukkan bahwa kondisi keseimbangan kapal tercapai pada sudut sebesar 0.3047 rad atau sekitar 17.45°. Nilai tersebut diperoleh hanya dalam tiga iterasi dengan error yang sangat kecil sehingga menunjukkan proses konvergensi yang baik.
Selain itu, project ini juga menunjukkan bahwa pemilihan nilai tebakan awal mempengaruhi kecepatan iterasi dan kestabilan solusi. Dengan demikian, metode Newton-Raphson dapat digunakan sebagai pendekatan yang efisien dalam analisis stabilitas kapal serta berpotensi dikembangkan lebih lanjut ke dalam program komputasi otomatis untuk mendukung analisis teknik perkapalan.BAB 1 PENDAHULUAN
1.1 Latar Belakang
Stabilitas kapal merupakan salah satu aspek terpenting dalam bidang teknik perkapalan karena berhubungan langsung dengan keselamatan operasional kapal di laut. Kapal yang memiliki stabilitas baik akan mampu kembali ke posisi seimbang setelah mengalami gangguan akibat gelombang, angin, maupun perpindahan muatan. Sebaliknya, stabilitas yang buruk dapat menyebabkan kapal mengalami kemiringan berlebih bahkan berpotensi mengalami capsizing.
Dalam analisis stabilitas kapal, kondisi keseimbangan biasanya dinyatakan melalui hubungan antara lengan penegak kapal (GZ) dan momen kemiringan luar (heeling moment). Permasalahan muncul karena hubungan tersebut bersifat non-linear sehingga sulit diselesaikan menggunakan metode analitik biasa. Oleh karena itu, dibutuhkan pendekatan numerik yang mampu menentukan akar persamaan secara cepat dan akurat.
Salah satu metode numerik yang banyak digunakan untuk menyelesaikan persoalan non-linear adalah metode Newton-Raphson. Metode ini bekerja melalui proses iterasi berulang dengan memanfaatkan nilai fungsi dan turunannya hingga diperoleh solusi yang konvergen. Dalam konteks stabilitas kapal, metode Newton-Raphson dapat digunakan untuk menentukan sudut equilibrium kapal ketika terjadi keseimbangan antara momen penegak dan momen luar.
Melalui project ini, saya mempelajari penerapan metode Newton-Raphson untuk menyelesaikan persoalan stabilitas kapal secara numerik. Analisis dilakukan mulai dari pembentukan fungsi matematis, implementasi iterasi, hingga evaluasi hasil konvergensi yang diperoleh.
1.2 Rumusan Masalah
Berdasarkan latar belakang tersebut, rumusan masalah pada project ini yaitu:
- Bagaimana metode Newton-Raphson digunakan dalam analisis stabilitas kapal?
- Bagaimana proses iterasi dilakukan untuk menentukan sudut equilibrium kapal?
- Bagaimana pengaruh nilai tebakan awal terhadap proses konvergensi?
- Seberapa efektif metode Newton-Raphson dalam menyelesaikan persoalan stabilitas kapal?
1.3 Tujuan Project
Tujuan dari project ini adalah:
- Memahami penerapan metode numerik dalam analisis stabilitas kapal.
- Mengimplementasikan metode Newton-Raphson untuk mencari sudut equilibrium kapal.
- Menganalisis proses konvergensi iterasi numerik.
- Mengevaluasi efektivitas metode Newton-Raphson dalam penyelesaian persamaan non-linear.
BAB 2 DASAR TEORI
2.1 Stabilitas Kapal
Stabilitas kapal merupakan kemampuan kapal untuk kembali ke posisi tegak setelah mengalami gangguan dari luar. Dalam kondisi stabil, kapal akan menghasilkan momen penegak yang mampu melawan momen kemiringan akibat pengaruh eksternal seperti gelombang, angin, atau perpindahan beban.
Parameter utama yang digunakan dalam analisis stabilitas adalah lengan penegak atau righting arm (GZ). Nilai GZ menggambarkan kemampuan kapal dalam menghasilkan momen pemulih terhadap kondisi miring. Hubungan antara sudut kemiringan dan nilai GZ biasanya membentuk kurva non-linear sehingga penyelesaiannya memerlukan pendekatan numerik.
Kondisi equilibrium kapal tercapai ketika:
F(φ) = GZ(φ) − Heeling Arm = 0
Ketika nilai fungsi tersebut sama dengan nol, maka momen penegak kapal sama dengan momen kemiringan luar sehingga kapal berada pada kondisi seimbang.
2.2 Metode Newton-Raphson
Metode Newton-Raphson merupakan salah satu metode numerik yang digunakan untuk mencari akar persamaan non-linear. Metode ini bekerja dengan memperbaiki solusi secara bertahap melalui proses iterasi.
Persamaan umum metode Newton-Raphson yaitu:
φn+1 = φn − F(φn) / F'(φn)
Metode ini memerlukan:
- Fungsi yang akan dicari akarnya.
- Turunan pertama dari fungsi.
- Nilai tebakan awal.
- Batas toleransi error.
Keunggulan metode Newton-Raphson adalah tingkat konvergensinya yang cepat dibandingkan metode iterasi lainnya.
2.3 Penerapan Metode Numerik dalam Stabilitas Kapal
Dalam bidang teknik perkapalan, metode numerik digunakan untuk menyelesaikan berbagai persoalan yang sulit diselesaikan secara analitik. Pada analisis stabilitas kapal, metode Newton-Raphson dimanfaatkan untuk menentukan sudut equilibrium kapal berdasarkan hubungan antara momen penegak dan momen kemiringan.
Pendekatan numerik ini sangat membantu karena data stabilitas kapal umumnya diperoleh dari kurva hidrostatik atau cross curves yang bersifat diskrit dan kompleks. Dengan metode iterasi, proses pencarian solusi dapat dilakukan lebih cepat, efisien, dan akurat.
BAB 3 METODOLOGI DAN IMPLEMENTASI
3.1 Pendefinisian Fungsi Stabilitas
Pada project ini, fungsi stabilitas kapal diasumsikan sebagai:
F(φ) = sin(φ) − 0.3
Persamaan tersebut digunakan untuk merepresentasikan kondisi keseimbangan antara lengan penegak kapal dan pengaruh momen luar.
Turunan pertama dari fungsi tersebut adalah:
F'(φ) = cos(φ)
3.2 Persamaan Iterasi Newton-Raphson
Untuk mencari akar persamaan digunakan metode Newton-Raphson dengan bentuk iterasi:
φn+1 = φn − F(φn) / F'(φn)
Dalam simulasi ini digunakan:
Tebakan awal:
φ0 = 0.5 rad
Batas toleransi error ditentukan sangat kecil agar hasil iterasi memiliki tingkat akurasi yang baik.
3.3 Tahapan Perhitungan
Tahapan penyelesaian numerik dilakukan sebagai berikut:
- Menentukan fungsi dan turunan fungsi.
- Menentukan tebakan awal sudut kemiringan.
- Menghitung nilai fungsi dan turunan fungsi.
- Melakukan iterasi Newton-Raphson.
- Mengevaluasi error hasil iterasi.
- Menghentikan iterasi ketika solusi telah konvergen.
3.4 Asumsi dan Parameter Simulasi
Beberapa asumsi yang digunakan pada project ini yaitu:
- Sistem stabilitas diasumsikan bersifat non-linear sederhana.
- Pengaruh viskositas fluida diabaikan.
- Fungsi stabilitas dimodelkan menggunakan pendekatan sinusoidal.
- Perhitungan dilakukan pada kondisi statis.
- Iterasi dihentikan ketika error mendekati nol.
BAB 4 HASIL PERHITUNGAN DAN ANALISIS
4.1 Iterasi Pertama
Diketahui:
φ0 = 0.5 rad
Maka:
F(0.5) = sin(0.5) − 0.3
F(0.5) = 0.4794 − 0.3 = 0.1794
Turunan fungsi:
F'(0.5) = cos(0.5)
F'(0.5) = 0.8776
Sehingga:
φ1 = 0.5 − (0.1794 / 0.8776)
φ1 = 0.2956 rad
4.2 Iterasi Kedua
F(0.2956) = sin(0.2956) − 0.3
F(0.2956) = 0.2913 − 0.3 = −0.0087
Turunan fungsi:
F'(0.2956) = cos(0.2956)
F'(0.2956) = 0.9566
Sehingga:
φ2 = 0.2956 − (−0.0087 / 0.9566)
φ2 = 0.3047 rad
4.3 Iterasi Ketiga
F(0.3047) = sin(0.3047) − 0.3
F(0.3047) = 0.3000 − 0.3 = 0.0000
Karena nilai error sudah sangat kecil dan mendekati nol, maka iterasi dihentikan.
Hasil akhir:
φ = 0.3047 rad
Konversi ke derajat:
φ = 17.45°
4.4 Analisis Konvergensi
Berdasarkan hasil iterasi, metode Newton-Raphson menunjukkan proses konvergensi yang sangat cepat. Hanya dalam tiga iterasi, solusi sudah mendekati nilai akar persamaan dengan error yang sangat kecil.
Hal ini menunjukkan bahwa metode Newton-Raphson sangat efektif untuk menyelesaikan persoalan non-linear pada analisis stabilitas kapal. Selain itu, nilai tebakan awal yang cukup dekat dengan solusi sebenarnya juga membantu mempercepat proses konvergensi.
4.5 Evaluasi Hasil Stabilitas
Hasil perhitungan menunjukkan bahwa kapal mencapai kondisi equilibrium pada sudut kemiringan sekitar 17.45°. Nilai tersebut menunjukkan kondisi ketika momen penegak kapal sama dengan momen kemiringan akibat gaya luar.
Melalui hasil ini dapat dipahami bahwa metode numerik memberikan pendekatan yang efisien dalam analisis stabilitas kapal dibandingkan metode manual. Penggunaan iterasi memungkinkan perhitungan dilakukan secara otomatis dengan tingkat akurasi yang baik.
BAB 5 PEMBAHASAN
Berdasarkan hasil perhitungan yang telah dilakukan, metode Newton-Raphson terbukti mampu menyelesaikan persoalan stabilitas kapal dengan proses iterasi yang cepat dan akurat. Pada iterasi pertama, nilai error masih cukup besar karena solusi awal masih jauh dari titik equilibrium. Namun setelah dilakukan iterasi kedua dan ketiga, nilai error menurun secara signifikan hingga mendekati nol.
Kecepatan konvergensi metode Newton-Raphson dipengaruhi oleh nilai tebakan awal yang digunakan. Dalam simulasi ini, tebakan awal sebesar 0.5 rad masih cukup dekat dengan solusi sebenarnya sehingga iterasi dapat berjalan stabil. Jika tebakan awal terlalu jauh, maka proses iterasi dapat mengalami divergensi atau memerlukan jumlah iterasi yang lebih banyak.
Selain itu, hasil project ini juga menunjukkan bahwa metode numerik memiliki peranan penting dalam bidang teknik perkapalan, khususnya pada analisis stabilitas kapal yang melibatkan persamaan non-linear. Dengan bantuan metode iterasi, proses analisis dapat dilakukan lebih efisien dan dapat dikembangkan ke dalam bentuk program komputasi otomatis.
Dalam penerapan nyata, metode ini dapat digunakan untuk membantu naval architect dalam memprediksi kondisi stabilitas kapal pada berbagai skenario operasional. Oleh karena itu, metode Newton-Raphson tidak hanya bermanfaat dalam bidang akademik, tetapi juga memiliki aplikasi praktis dalam dunia industri maritim.
BAB 6 KESIMPULAN
Berdasarkan hasil project yang telah dilakukan, dapat disimpulkan bahwa metode Newton-Raphson merupakan metode numerik yang efektif untuk menyelesaikan persoalan stabilitas kapal yang bersifat non-linear. Melalui proses iterasi, metode ini mampu menentukan sudut equilibrium kapal dengan cepat dan tingkat akurasi yang baik.
Pada simulasi yang dilakukan, fungsi stabilitas kapal dimodelkan dengan persamaan F(φ) = sin(φ) − 0.3. Hasil perhitungan menunjukkan bahwa kondisi keseimbangan kapal tercapai pada sudut sebesar 0.3047 rad atau sekitar 17.45°. Nilai tersebut diperoleh hanya dalam tiga iterasi dengan error yang sangat kecil sehingga menunjukkan proses konvergensi yang baik.
Selain itu, project ini juga menunjukkan bahwa pemilihan nilai tebakan awal mempengaruhi kecepatan iterasi dan kestabilan solusi. Dengan demikian, metode Newton-Raphson dapat digunakan sebagai pendekatan yang efisien dalam analisis stabilitas kapal serta berpotensi dikembangkan lebih lanjut ke dalam program komputasi otomatis untuk mendukung analisis teknik perkapalan.